DJI Mavic 3 行業系列的幾種返航模式
UTC 無人機培訓總部
簡述
DJI Mavic 3 E\T自動返航時,默認自動繞開障礙物,按系統規劃路線返航,而不是先升高再直線返航。
-
選擇“智能返航”時,
連返航高度也是系統自動規劃的,人為設定的“返航高度”無效。
-
選擇“設定高度返航”時,
返航高度是人為設定的“返航高度“,路線是系統自動規劃的,一般為直線到最後一次記錄的返航點。
-
觸發智能返航時,
當環境、光線不滿足以上高級智能返航的工作要求時,飛行器將進行直線返航(即傳統返航模式)。
(以上是寫給1年以上飛行經驗“老飛手”的省流說明,理解了就不用往下看了,想深究的話就去閱讀用戶手冊16-20頁,鏈接如下
https://dl.djicdn.com/downloads/DJI_Mavic_3_Enterprise/20221025/DJI_Mavic_3E_3T_User_Manual_CHS.pdf)
一、功能介紹與使用方法
DJI Mavic 3行業系列的返航模式包含“設定高度返航”與“智能返航”。 (閱讀本文的學員,可打開DJI RC PRO行業版遙控器,跟隨講解步驟學習。本文基於下圖版本固件編寫。)
設定高度返航
“設定高度返航”模式下,飛行器將尋找空曠環境上升到設定返航高度,並自動規劃最佳返航路線進行返航。
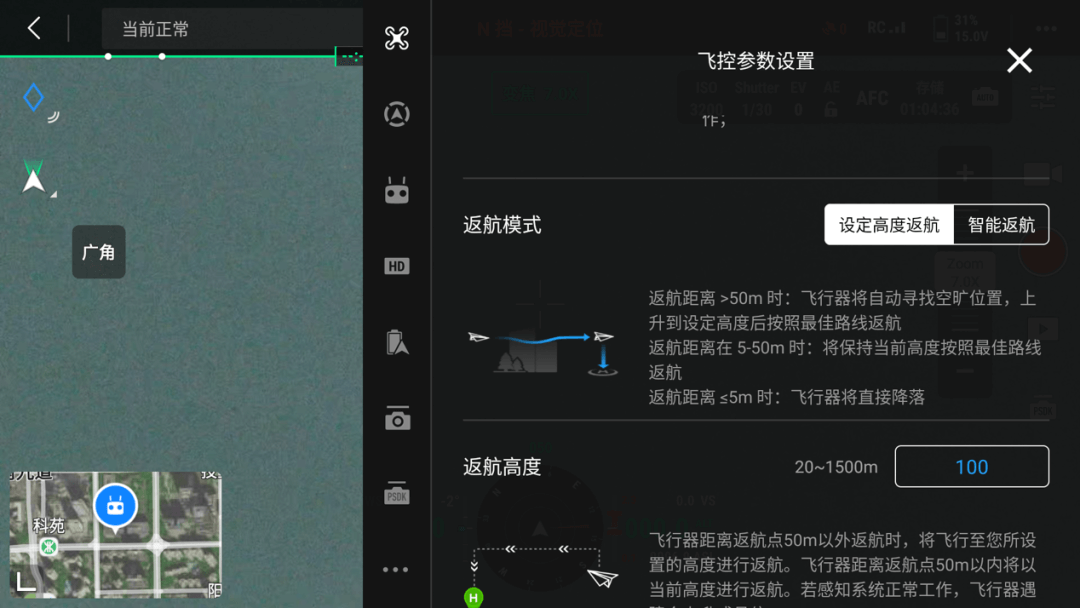
開啟飛行器與遙控器,依次點擊“設置”-“飛控參數設置”,滑動屏幕,可看到“返航模式”與“返航高度”設置區域。(⚠️注意:設置區域內,均有詳細文字介紹,請仔細閱讀)
點擊“設定高度返航”,設置“返航高度”(舉例100米),隨後安全的飛行51米。長按遙控器“返航鍵”,聽到提示音後鬆開,執行“設定高度返航”動作。 1. 當返航距離>50米時,如果飛行器高度小於“返航高度”,飛行器將(字幕:繞開障礙物)尋找空曠環境上升到設定返航高度(舉例100米),並規劃最佳返航路線,繞開障礙物自動返航。
“返航距離”概念補充
2. 當返航距離為5-50米時,飛行器不會上升至設定的返航高度,將保持當前高度規劃最佳返航路線,自動返航;
3. 當返航距離≤5米時,飛行器將直接降落;
智能返航
“智能返航”模式下,飛行器將自動規劃最佳返航高度與路線進行返航。
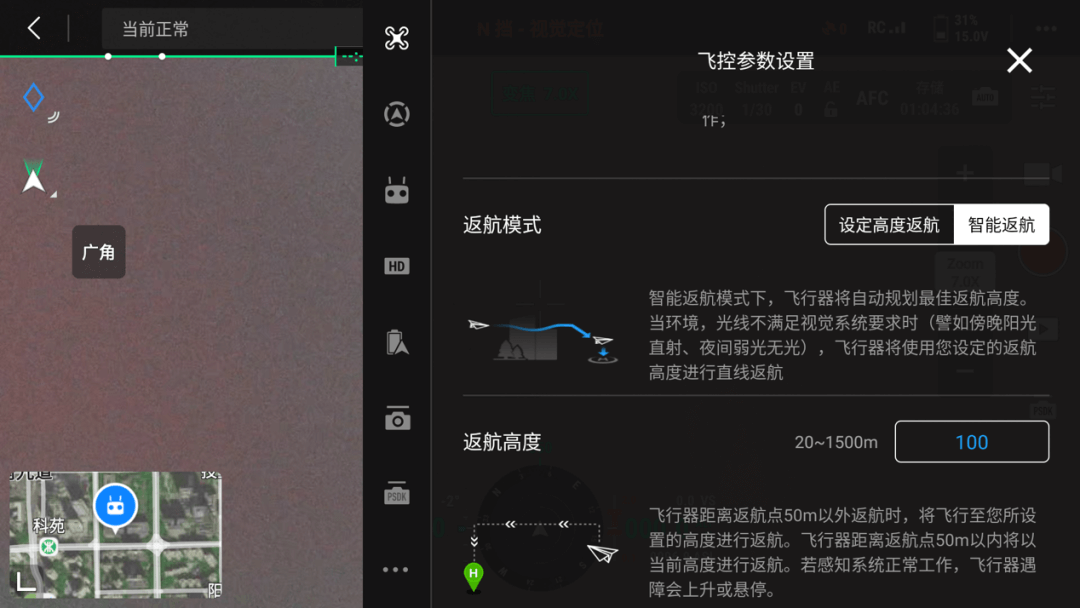
在“飛控參數設置”頁面,“返航模式”區域,點擊“智能返航”。(⚠️注意:設置區域內,均有詳細文字介紹,請仔細閱讀)
隨後安全的飛行51米,長按遙控器“返航鍵”,聽到提示音後鬆開,執行“智能返航”動作。
此時,設定的“返航高度“無效,飛行器將規劃最佳返航高度與路線,繞開障礙物自動返航。
二、注意事項
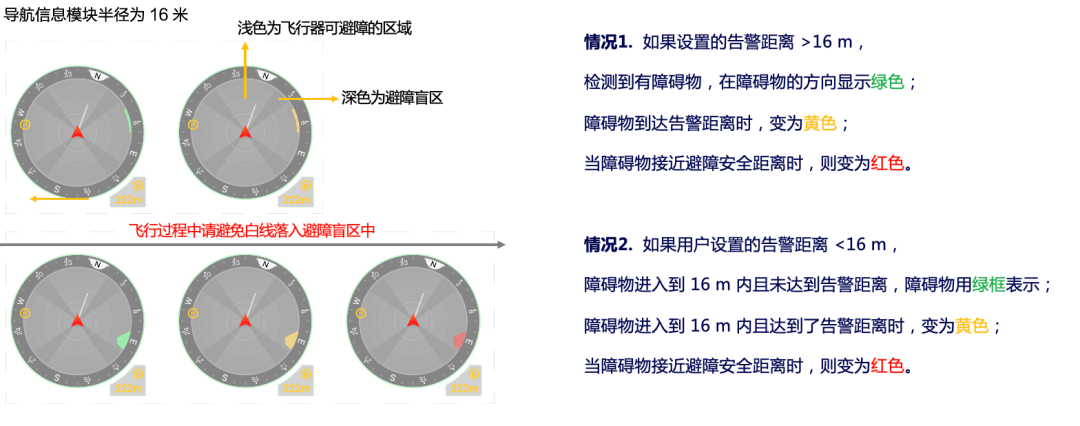
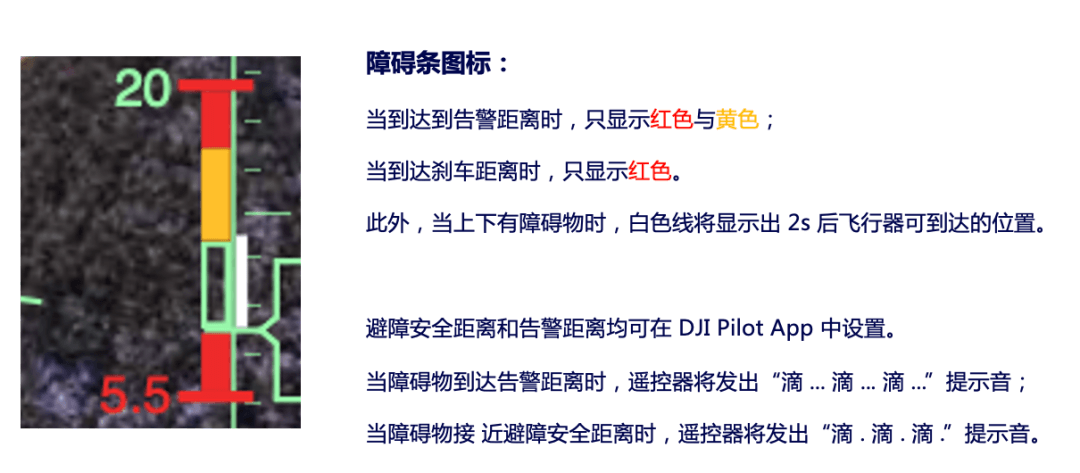
1. 使用兩種模式“返航”時,均可通過導航信息模塊,了解飛行器周圍障礙物情況; (以上圖片為“巡檢”課程的課件內容)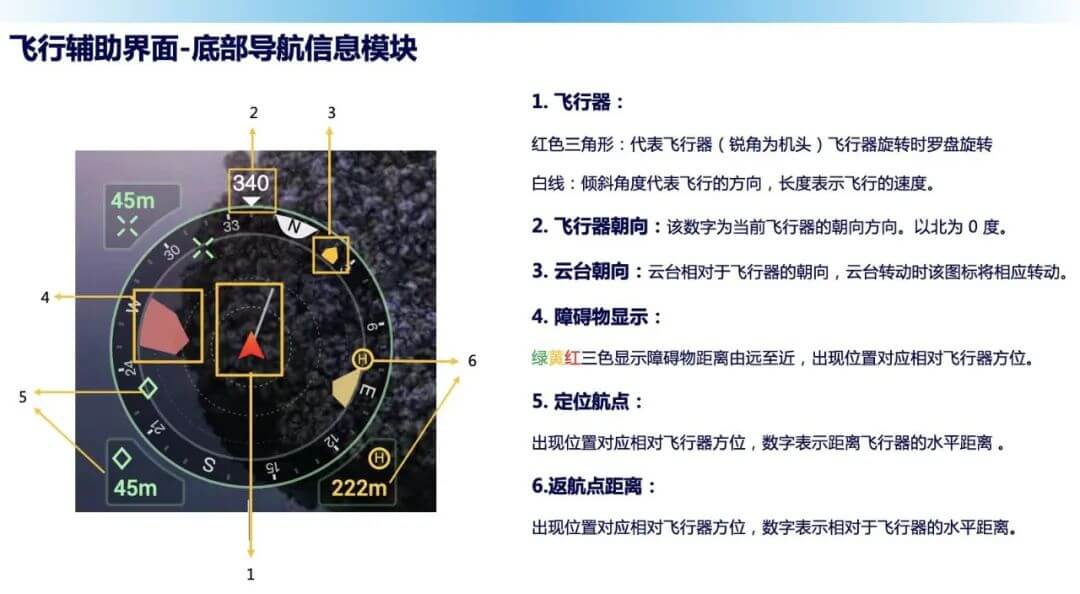
2. 返航過程中,可手動取消返航; 3. 選擇“設定高度返航”時,如果飛行器高度大於設置的“返航高度”,飛行器會根據最佳路線下降高度;(這點和以往機型不同,請注意)
4. 返航時,默認執行“繞行”感知避障,無法更改;
5. 視覺感知系統,無法識別沒有紋理的表面;無法在光照環境不足、光照過強、光照劇烈變化的環境下正常使用;無法識別電線、風箏線等細小的障礙物;(⚠️注意:詳情請查詢用戶手冊感知系統部分)
6. 當環境、光線不滿足視覺系統要求時,飛行器將使用設定的“返航高度“直線返航,此時感知避障功能無效,請謹慎飛行。(⚠️注意:譬如傍晚陽光直射、夜間弱光無光)
功能是輔助,工作慎飛行 ps:王老師賦詩一首