10 分鐘2 公里| DJI大疆L1 激光雷達城區配網點雲建模示範
DJI 行業應用
在電網運維向智能化、數字化邁進的過程中,三維點雲數據模型的重要性日益凸顯。基於三維點雲模型,運維單位可以搭建設備信息管理數據庫,實現線路可視化、數字化;還可規劃無人機自動化飛行航線,大幅提升巡檢效率。

其中,城區配網的三維點雲模型採集和無人機自動飛行一直是業內難題。配網環境複雜:線路杆塔位於人、車通行道路之間,空間狹小,兩側寬度 10~20 米不等;線路通道兩邊建築物高於杆塔高度 2~10 倍;線路兩側的樹木也可能會高於導線和杆塔;周圍樓房之間、杆塔之間常有斜拉線;遮擋情況導致無人機 GPS 衛星信號差。
 要完成近距離(3m 以內)和多角度(杆塔的上、左、右、下)有效巡檢,無人機飛手的巡檢技術水平和心理素質都面臨著巨大考驗。要解決城區配網的自動化巡檢問題,首先要能生產高質量的點雲數據,把複雜工況場景中的細節全部掃描出來。
要完成近距離(3m 以內)和多角度(杆塔的上、左、右、下)有效巡檢,無人機飛手的巡檢技術水平和心理素質都面臨著巨大考驗。要解決城區配網的自動化巡檢問題,首先要能生產高質量的點雲數據,把複雜工況場景中的細節全部掃描出來。
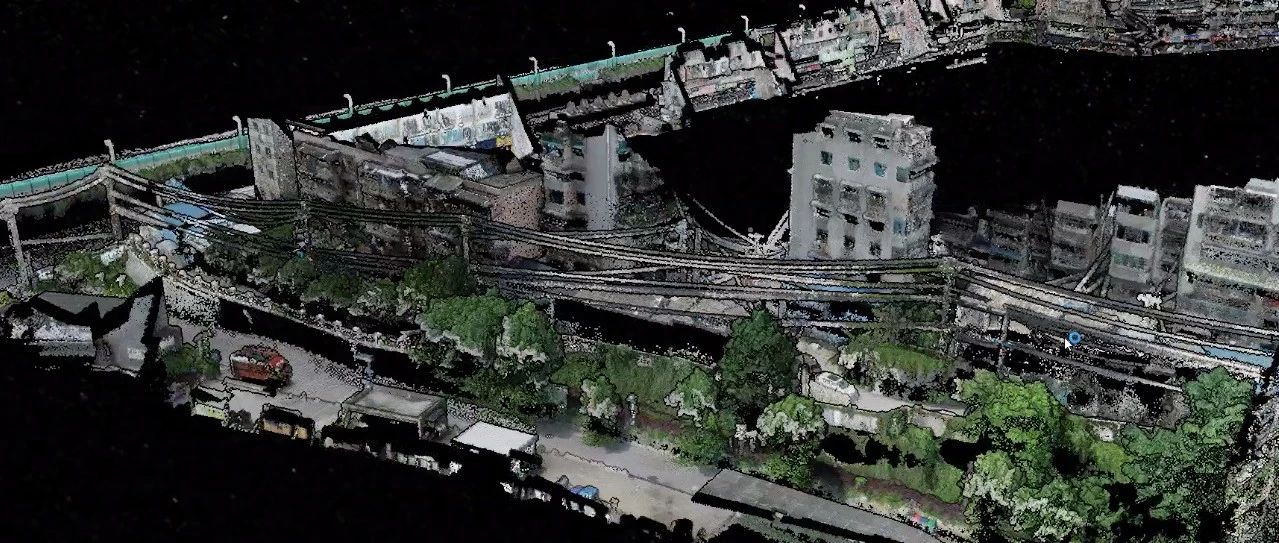
近日,大疆行業應用聯合合作夥伴,使用經緯 M300 RTK 搭載 L1 激光雷達,1 架次 10 分鐘完成 1.9 km的南網某城區 10kV 配網點雲數據采集;使用大疆智圖軟件,13 分鐘完成 6.43 GB 的數據處理,生成模型,有效解決了這一業內難題。
◼流程說明
作業場景和目標:南網某城區配網環境,使用經緯 M300 RTK 和大疆 L1 激光雷達進行 10kV 配網架空線路以及通道內周邊環境的建模工作。實際工作中包含外業採集與內業處理兩部分。
◼外業部分
- 現場勘測:步行或者開車觀察整個作業路徑,並對其中的危險點和難點拍照記錄,分析和制定採集點雲的航線路徑規劃方案,實地落實好每一條航線的起飛點與降落點。
- 創建航線:使用經緯 M300 RTK 內置的“在線任務錄製”功能,按照航線規劃方案在每一基有高差和轉彎的杆塔上進行“打點”,完成航線錄製後生成本次的數據采集航線。
- 航線編輯:
L1激光雷達設置參考值:
掃描模式:非重複性掃描。在飛行高度較低,飛行速度較慢的情況下,採用非重複性掃描能在只掃描一遍的情況下獲得更多的物體立面信息,兼顧效率與質量。
雲台角度:-90°。
回波模式:三回波。減少因為遮擋導致的杆塔、導線、樹木、拉線、光纖、網線等點雲漏采的情況。
採樣頻率:160KHz/回波。使每次回波獲得最高的點雲密度,由於總上限是480KHz,所以採用三回波和二回波點雲數據量大小基本不會有變化。
點雲上色:真彩上色。
經緯 M300 RTK 自動飛行採集航線設置參考值:
打點/飛行高度:高於被測物體 15-25 m。雖然 10kV 配網線路寬度只有 1.5m-2m 左右,但是在掃描時仍然要充分考慮周邊環境,建議掃描外擴範圍為 20 m 左右,後續在規劃航線的時候能夠充分考慮範圍內高層建築對航線的影響。
飛行速度:5m/s。配網場景工況複雜,同一坐標位置在不同高度有多層物體,需要相對降低飛行速度才能將盡可能多的信息掃描完整。
海拔高度:跟隨航線。保持與打點的高度一致。
飛行器偏航角:沿航線方向。保證掃描時機頭方向為航線行進方向。
雲台控制:手動控制。
航線類型:直線飛行,飛行器到點停。

經緯 M300 RTK 自動飛行採集航線的航點動作設置參考值:
首個航點:航點動作添加“開始等時間間隔拍照(2秒)”和“開始錄製點雲模型”。
中間等航點:無需設置,飛行過程中會繼續保持點雲錄製和間隔拍照。
末端航點:航點動作添加“結束間隔拍照”和“結束錄製點雲模型”。
其他設置要點:速度、飛行器偏航角、航點類型設置為跟隨航點動作。海拔高度設置為不跟隨航點動作。
注意:由於城區各種障礙物遮擋以及信號干擾源較多,進行 8 字標定飛行時需要選擇空曠位置。執行航線時,無人機飛行配速不宜太快,採集過程中無人機駕駛員要時刻關注無人機圖傳、數傳、衛星信號以及 RTK 信號的狀態,發現某項信號衰減應該馬上採取對應的處理策略立刻調整,保持整個採集過程中各項數據鏈路穩定狀態。
◼內業部分
- 在大疆智圖中新建 [激光雷達點雲處理] 任務,導入大疆 L1 採集的原始數據文件夾,由於配網線路分段較多,將此次需要重建的多個數據文件夾導入到同一任務進行點雲模型重建。
- 輸出坐標系和高度設置:本次作業設置 WGS84 的坐標系,並選擇對應 UTM 投影帶(本案例地區為 UTM zone 48N),在後續的杆塔自主精細化巡檢的航線規劃過程中,點雲模型可以直接加載使用,不用再進行坐標系的轉換。
- 開啟點雲精度優化功能,解算多架次的激光數據時能夠將各段數據無縫連接(需要大疆智圖專業版以上才能使用此功能)。
◼作業總結
- 本次外業採集長度為 1920m、1 個架次 10 分鐘完成,飛行前的打點時間為 10 分鐘左右;按照每天實際作業時間 5 小時計算(去除轉場時間),在保證作業安全的前提下,日均作業量約為 25km(具體作業量看現場工況複雜程度)。
- 本次作業大疆 L1 採集的原始數據大小為 6.43 GB。使用大疆智圖,一站式離線處理數據,開啟點雲精度優化功能,模型重建耗時 12 分 57 秒,多段數據融合生成的點雲模型數據大小為 15.6GB(包含.pnts格式和.las格式)。
◼L1 為配網巡檢解決了哪些問題?
點雲採集
可解決城市配網架空線路通道工況下難以通過可見光相機的方式進行高精度、高質量點雲數據采集的問題,包括:1. 可見光採集設備無法通過實體遮擋物採集到更下層的細節;2. 可見光採集設備在採集架空線路數據時,需要一定長度的橫向外擴飛行,當飛行外擴距離大於周邊建築物與杆塔的距離時,由於建築物高於杆塔,外擴飛行所拍到的可見光照片都是建築物頂部,使得需要建模區域無法保證有效的外擴重疊率而造成點雲模型缺失。
L1 可以避免可見光採集時因建築物遮擋導致的點雲缺失
無人機精細化巡檢
傳統人工手動控制無人機在配網架空線路複雜的工況中飛行並進行精細化巡檢,很難保證無人機駕駛員在保持安全距離的情況下拍出符合標準能夠分辨杆塔缺陷的照片;且巡檢照片的質量和數量會隨著不同無人機駕駛員的技術水平、抗壓能力和責任心等因素影響而產生較大的波動,不利於機巡作業數據的標準化生產。大疆 L1 生成的點雲模型可用于規劃無人機自主飛行航線,從而進行配網架空線路高質量且標準統一的無人機精細化巡檢。

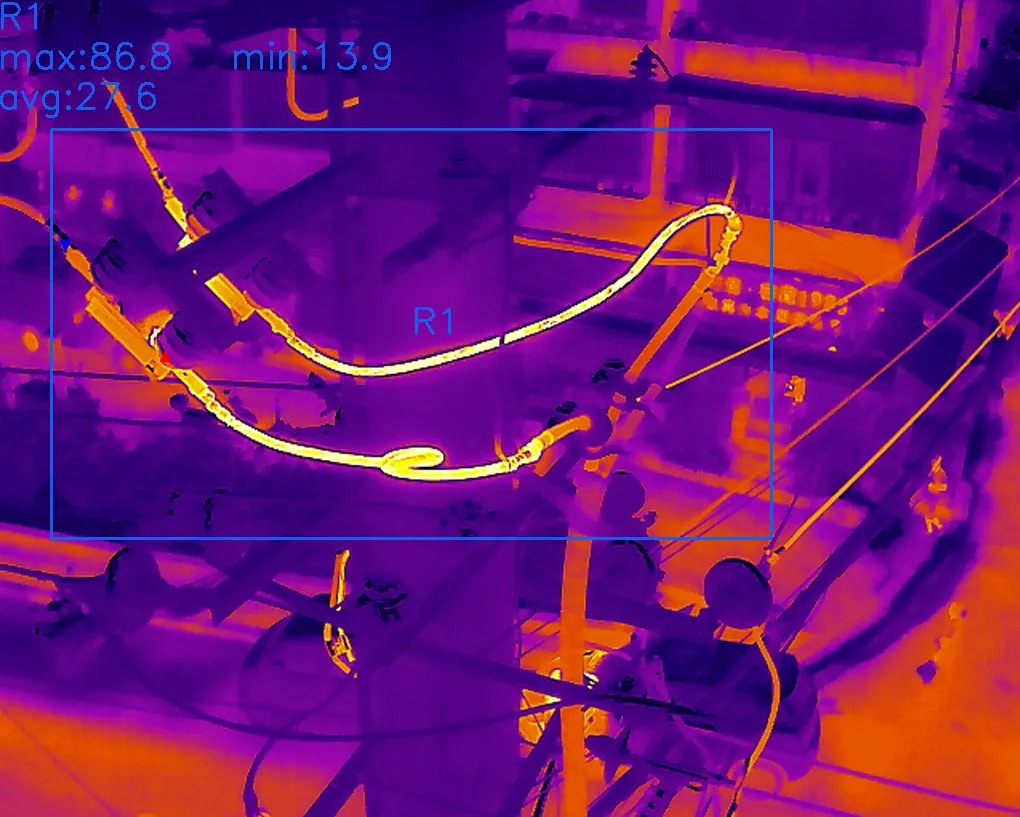
用電高峰巡檢:城市配網架空線路的用電負荷主要開始於每天工作結束後,主要集中在每天傍晚 18:30-22:00 之間。人工操作無人機在這個可見光線不足的時段進行巡檢飛行是風險極高的行為,而基於大疆 L1 激光雷達採集的點雲模型所規劃的無人機自主飛行航線,讓這一目標得以實現,可以開展夜間工況下對架空線路易發熱點的巡檢測溫工作;這是人工控制無人機巡檢和日間無人機巡檢所不能做到的。
案例支持:
雲南近達信息技術有限公司
貴州斯凱威科技有限公司
貴州廣思信息網絡有限公司