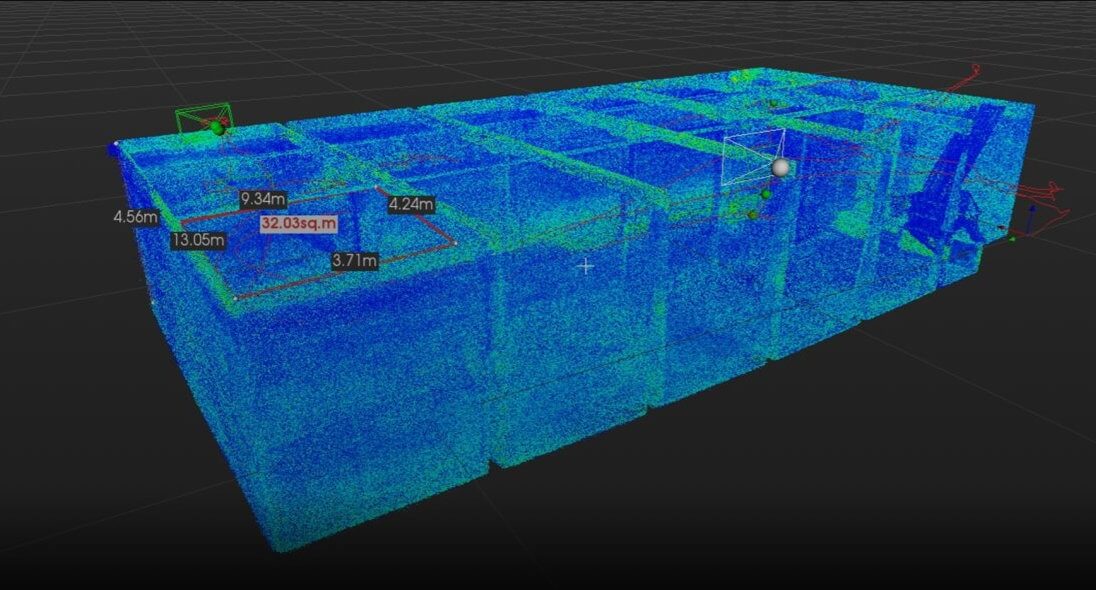
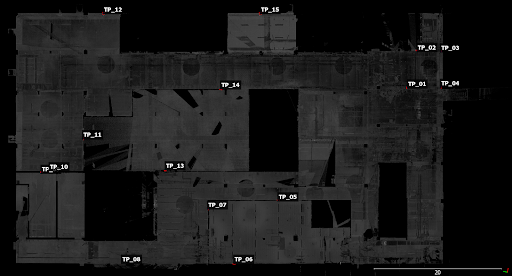
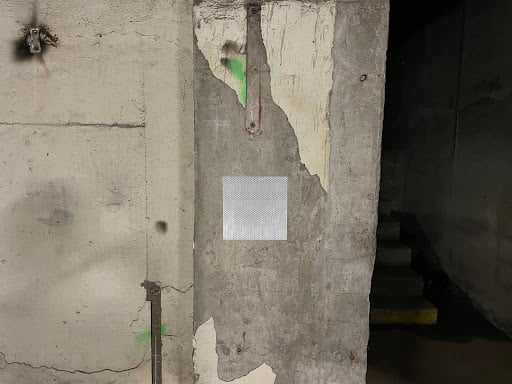
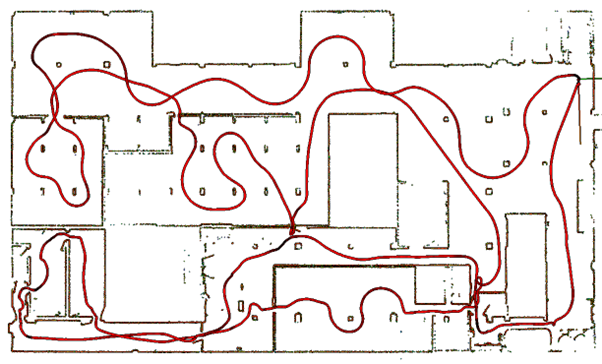
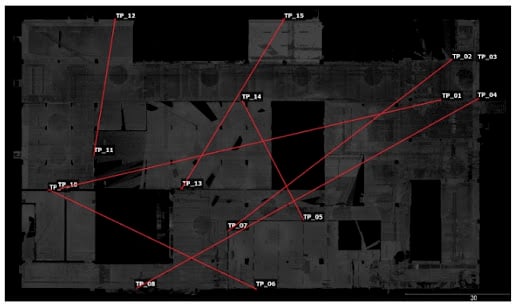
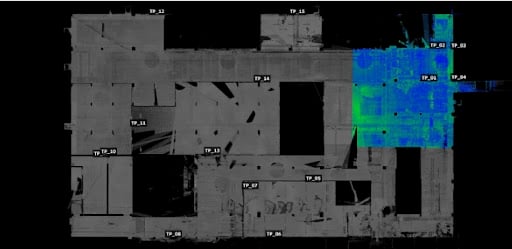
在過去幾年中,激光雷達(LiDAR)數據迅速成為創建精確3D模型的最可靠基礎之一。 像礦業、建築和基礎設施等行業正在使用這些模型進行例行檢查、進行安全評估、跟踪資產隨時間的變化並支援項目規劃。 這些行業專業人士從使用LiDAR數據製作的3D模型中得到的輸出包括詳細的數字孿生、精確的2D和3D測量、能夠定位資產缺陷位置的能力、將數據匯出到常見的3D點雲文件擴展名(如*.e57、.las、.laz和*.ply)、以及將多個地理參考的3D模型合併以跟踪資產隨時間的變化。 無論行業或輸出為何,模型的質量對其有用性至關重要。如果數據不準確——這是在3D建模中具有特定定義的術語,將在下面的另一個部分中進行介紹——那麼它可能無法充分代表現實世界,提供有價值的見解。 本文涵蓋了GeoSLAM和Flyability產品團隊專家進行的測試所得出的發現,該測試突出了使用FlyAware和GeoSLAM Connect / FARO Connec 處理的模型之間的差異。 Flyability的Elios 3配備了Ouster的OS0-32 LiDAR傳感器和執行同時定位和地圖繪製(SLAM)的能力,這意味著它可以在飛行時實時創建3D模型。 飛行後,Elios 3用戶可以使用GeoSLAM Connect / FARO Connec 處理他們收集的LiDAR數據,以創建精確、準確的3D模型。 3D實時模型和後處理模型具有不同的用途,不應被視為相同類型的3D模型。儘管3D實時模型可用於任務期間的導航、路線規劃和驗證掃描範圍,但您使用GeoSLAM Connect/FARO Connec 製作的後處理模型可以提供準確的點雲。 3D建模中的全局準確度與點雲中兩點之間的距離有關,在這些點中物體不能從單一位置看到(例如兩個房間之間的距離)。 地理參考準確度是全局準確度加上由對齊方法引起的不準確性。對齊方法的示例包括基於目標的註冊和迭代最近點(ICP)。 漂移是用於描述捕獲過程中準確度累計下降的3D建模術語。準確度不容易用絕對值表達(例如+-2cm/.79英寸),因為在缺乏地面控制點或GNSS的情況下,絕對誤差通常會隨著資產大小或測量距離的增加而增長。 例如,30米(98.4英尺)的測量誤差可能小於300米(984英尺)的距離測量誤差,因為移動掃描儀穿過資產時,錯誤會隨著旅行和記錄數據的時間增長而累積。這種距離上的錯誤累計由詞漂移描述,代表了數據收集期間已行駛距離的百分比——例如,300米(984英尺)距離上的1%漂移對應於與實際相比的3米(9.84英尺)誤差。 為了比較和評估Elios 3的點雲的全局準確度和地理參考準確度,使用FlyAware和GeoSLAM Connect分別處理了相同的掃描。GeoSLAM 3D建模專家和Flyability產品團隊在一家工業工廠內進行了測試。 在評估任何系統的準確度時,必須使用第二個測量系統來提供基準值(即控制),並且此系統的準確度必須高於正在測試的系統。 要測試Elios 3等移動映射解決方案的準確度,行業標準是使用全站儀(TPS)或地面激光掃描儀(TLS)作為控制,因為這兩種方法的準確度都超過了移動映射解決方案的準確度。 全站儀和TLS方法之所以比移動映射解決方案的準確度更高,是因為它們每個都從單個固定位置捕獲數據,並使用點匹配算法將多個位置註冊在一起。 相比之下,像Elios 3這樣的移動映射解決方案在收集數據時持續移動,當無人機穿越正在映射的環境時,它會在多個位置捕獲數據。 我們執行的全局精度和地理參考精度測試依賴於地面激光掃描儀(TLS)收集的數據作為其控制。值得注意的是,由於資產的大小,控制需要超過六個小時的時間來獲取數據。相比之下,Elios 3需要8.5分鐘來獲取數據。 為了評估Elios 3使用GeoSLAM Connect處理的點雲的全局精度和地理參考精度,LiDAR數據是在位於瑞士弗里堡的Blue Factory工廠中捕獲的。 該工廠由12個大小各異的房間組成,中間有幾個門,適合Elios 3的典型工業環境。 15個反光鑽石等級3M(9.84英尺)目標(200mm x 200mm / 7.87英寸 x 7.87英寸)均勻放置在測試環境周圍,如下面的兩張圖所示: 使用 Elios 3 進行了三次掃描,以擷取用於測試的 LiDAR 數據,所有掃描均遵循相同的大致飛行路徑,以確保結果之間的一致性。 所有掃描在同一位置開始和結束,既是為了一致性,也是為了確保按照建議關閉資料擷取循環。透過在擷取中執行循環並從側面進入門口來維護 SLAM 資料擷取的最佳實踐,以確保在進入新環境時具有良好的可視化效果。 這 3 次掃描的平均飛行時間為 8 分鐘,飛行路徑約為 450 公尺(1,476 英尺),飛行時間為 30 分鐘。使用 GeoSLAM Connect 處理的資料集平均每次掃描 1.08 億個點,而使用 FlyAware 處理的資料集平均每次掃描 2,100 萬個點。 為了確保測試代表了最終用戶可以從系統中期望的內容,GeoSLAM處理使用了在GeoSLAM Connect 2.1.1中找到的標准Flyability處理參數。數據既沒有通過其他方式重新處理,也沒有被減少或過濾。 FlyAware實時模型在Elios 3上進行處理。它既沒有重新處理,也沒有過濾或減少。 作為後處理步驟,運行了一個提取工具*來識別Elios 3數據和TLS數據中的15個目標。一旦識別了目標,工具就會提取目標的質心,以提供15個Elios 3和TLS數據的質心。 TLS數據的質心用作控制點,Elios 3的質心用於比較。 *注意:此提取工具將在GeoSLAM Connect 2.3.0中提供。 為了評估Elios 3的全局精度,進行了距離測量,並將Elios 3數據與TLS控制數據進行了比較。 完成該過程的步驟包括: Elios 3 資料的全局精度評估結果在使用 FlyAware 處理時產生的全局精度 RMSE 為18.3 公分(7.20 吋),而使用 GeoSLAM Connect 處理時產生的全局精度 RMSE 為3.5 公分(1.38 吋)。 比較 FlyAware 和 GeoSLAM Connect 產生的全局精確度: 在上一節中,我們討論了系統的全局精度。在本節中,我們將評估第一註冊方法——起飛位置周圍的點雲對點雲對齊。 地理參考精度評估了系統的全局精度以及使用的地理參考技術的準確度。 為了模擬Elios 3掃描的常見用例,將Elios 3點雲對齊到起飛位置周圍的參考模型。這樣做模擬了在無法訪問的區域進行任務期間可能採用的程序,其中Elios 3用於完成現有的地理參考模型,並且控制只能放在飛行的起點。僅在掃描環境的一個部分中擁有控制導致註冊過程中的任何不準確性在整個掃描中傳播,並將導致與在整個掃描中使用目標或地面控制點(GCP)相比的不準確性增加。 為了評估使用FlyAware和GeoSLAM Connect時Elios 3的點雲的點對點對齊準確度,實施了以下工作流程: 使用FlyAware處理的Elios 3數據的地理參考精度評估結果產生了64.9厘米(25.6英寸)的準確度RMSE值,漂移率為1.41%。 使用GeoSLAM Connect處理數據集產生了11.0厘米(4.35英寸)的準確度RMSE,漂移率為0.19%。 比較由FlyAware和GeoSLAM Connect產生的地理參考精度: 測試結果表明,與使用 FlyAware 處理的點雲相比,使用 GeoSLAM Connect 處理的 Elios 3 點雲精度高、漂移小。 與單獨使用 FlyAware 處理相比,使用 GeoSLAM Connect 處理的全域精度平均提高了 5.2 倍。 透過使用 GeoSLAM Connect,Elios 3 能夠滿足最小系統精度為 35 毫米(1.38 吋)的勘測要求。 雖然即時模型為使用者提供了用於導航、路線規劃和掃描覆蓋驗證的即時視覺化環境,但 182 毫米(7.2 英吋)的平均精度並不適合這些應用。 雲到雲評估表明,Elios 3 可以輕鬆實現在無法進入的環境中繪製地圖和地理參考。 在這些使用案例中,漂移的影響最為明顯,因為精度受到參考框架中點與點之間的距離和分佈的限制。 從地理參考精度來看,使用 GeoSLAM Connect 處理的點雲精度是使用 Flyaware 處理的點雲精度的 5.9 倍。 這可歸因於 FlyAware 處理過程中累積的系統漂移較高,其中漂移值是 GeoSLAM Connect 所產生值的 7.42 倍。 從 FlyAware 點雲與 TLS 控制點在起飛位置超過 75 公尺處的水平偏移可以清楚地觀察到這一點。使用 FLYAWARE 製作的 3D 模型有多精準?
介紹
我們為什麼要進行這些測試
定義我們的術語:全局準確度、地理參考準確度和3D建模中的漂移
使用Elios 3進行全局準確度和地理參考準確度評估
建立控制
測試環境


收集數據
資料處理和質心提取
評估全局精度——距離測量
結果
dXYZ 殘差
聯絡線
掃描1
掃描2
掃描3
均方根誤差
TP01-TP08
0.262442628
0.296340977
0.167084387
0.248066725
TP02-TP07
0.399276419
0.474258956
0.293598156
0.39604002
TP04-TP08
0.244595845
0.271325485
0.165172459
0.231463883
TP05-TP14
0.164077752
0.161778041
0.009034386
0.1331356
TP07-TP09
0.304534955
0.089664317
0.186927971
0.212699549
TP11-TP12
0.044822093
0.019770349
0.010207113
0.028891013
TP14-TP15
0.028717208
0.040272922
0.026707821
0.032454552
均方根誤差
0.183250192
評估地理參考精度——起飛周圍的點雲對點雲對齊
結果
dXY 結果
目標
掃描1
掃描2
掃描3
均方根誤差
TP001
0.049359
0.04199
0.034349
0.042345
TP002
0.040529
0.04021
0.032837
0.038025
TP003
0.058968
0.031769
0.041731
0.045563
TP004
0.026313
0.03242
0.034061
0.03111
距離
漂移
TP005
0.407487
0.492586
0.361552
0.424031
45
0.94%
TP006
0.767742
1.024275
0.701042
0.84262
56
1.50%
TP007
0.758375
1.055128
0.722385
0.858345
50
1.72%
TP008
1.546672
1.920633
1.276418
1.60315
68
2.36%
TP009
2.252747
2.427497
1.744062
2.160969
88
2.46%
TP010
0.892565
1.155121
1.145422
1.071287
73
1.47%
TP011
0.688044
0.945483
0.930786
0.862884
69
1.25%
TP012
0.542971
0.827581
0.864152
0.75861
57
1.33%
TP013
0.417983
0.498081
0.552083
0.492473
50
.98%
TP014
0.214618
0.32831
0.34818
0.302808
35
.87%
TP015
0.123919
0.227974
0.241153
0.204518
30
.68%
平均均方根誤差
0.649249
漂移
1.41%
結論





先創國際股份有限公司
專業代理經嚴格評鑑、篩選的世界知名一流品牌,並深耕各類型通路與網絡。近年來更積極拓展公部門、教育單位、及企業用戶,提出各項解決方案。專業形象和熱誠服務獲得市場普遍肯定。
統一編號:80282240
—
售後服務中心
114台北市內湖區瑞光路66巷25號1樓
Tel: (02)8792-8855 # 分機160~163
台北總公司
114台北市內湖區瑞光路76巷43號4樓
Tel: (02)8792-8855
台中分公司
台中市西區公益路161號8樓之9 (I室)
Tel: (04)2302-1133
高雄分公司
高雄市三民區九如一路502號13樓B6
Tel: (07)390-0988
—
營業時間: 星期一~星期五 9:00~18:00 (不含國定例假日)。
客服信箱:service@esentra.com.tw
—

