DJI Terra大疆智圖免費支援L2 點雲資料後處理

大疆智圖
版本更新
支持禪思 L2 點雲處理
1.全新適配禪思 L2
大疆智圖全新支持禪思 L2 點雲資料後處理,用戶無需額外付費購買軟體⁽¹⁾,即可使用大疆智圖雷射點雲端重建功能。在產品生命週期內,大疆智圖點雲功能也將持續豐富,L2用戶可免費使用後續新增的更多點雲處理功能。
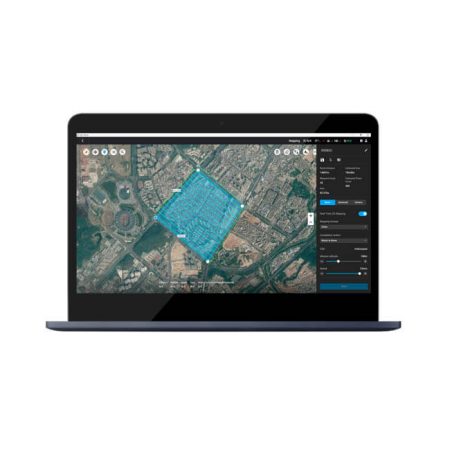
大疆智圖一鍵處理
如需下載大疆智圖,可在禪思 L2 官網頁面直接下載使用,無須啟用;此外,L2 附贈 3 個月全功能版大疆智圖軟體使用,滿足更多負載的資料處理需求。
2.雲端PPK功能⁽²⁾
智圖支援透過雲端PPK功能匹配離線基地台數據⁽³⁾
外業飛行時無需自架基地台,軟體內建雲 PPK 解算能力,在點雲資料重建過程中,透過網路下載虛擬 PPK 基地台數據,並進行高精度(GNSS+INS)後處理位置解算,提升點雲資料精度,軟硬整合解決方案大幅提升L2作業可靠性。

禪思L2
差分技術是一種在無法接收差分訊號的環境下使用的定位方法,其中包括事後差分技術PPK(Posst-processed Kinematic)
使用傳統PPK,飛行器如因網路通訊品質不佳、圖傳斷連等情形而意外遺失RTK即時差分數據,需在作業前架設RTK基地台,作業完成後將RTK基地台數據導入大疆智圖進行後差分處理解算,提升點雲成果精度。
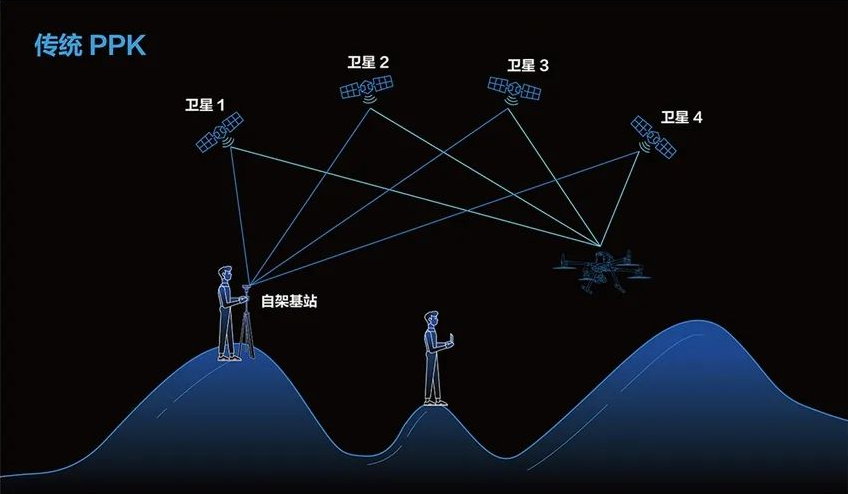
傳統PPK,需要自架基地台
而利用雲PPK技術,外業飛行無需架設基地台,無需單獨拷貝基地台PPK數據。在解算過程中,大疆智圖將從雲端自動下載飛行區域週邊適合的虛擬基站文件,參與PPK差分解算。智圖內建高精度後處理位置解算服務,基於全國高密度地基增強網絡,實現L2點雲端資料全天候覆蓋的高精度定位解算。
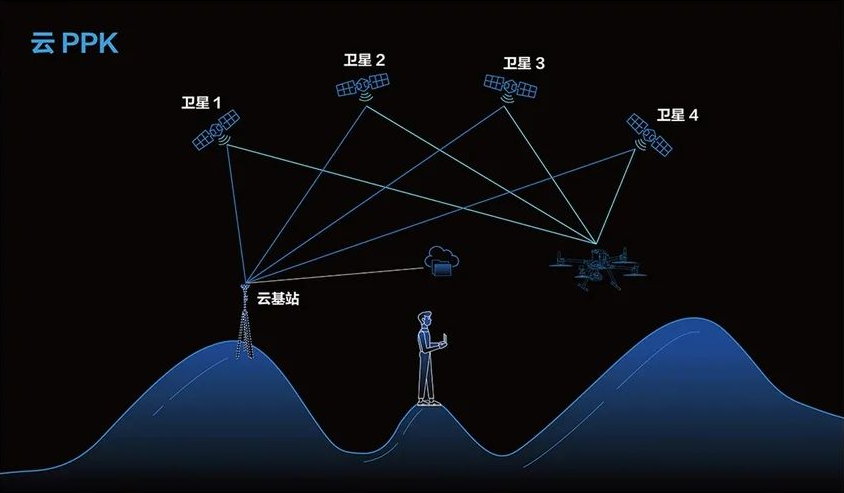
雲端PPK 使用全天候全覆蓋的虛擬基地台資料進行解算
新增多個點雲功能
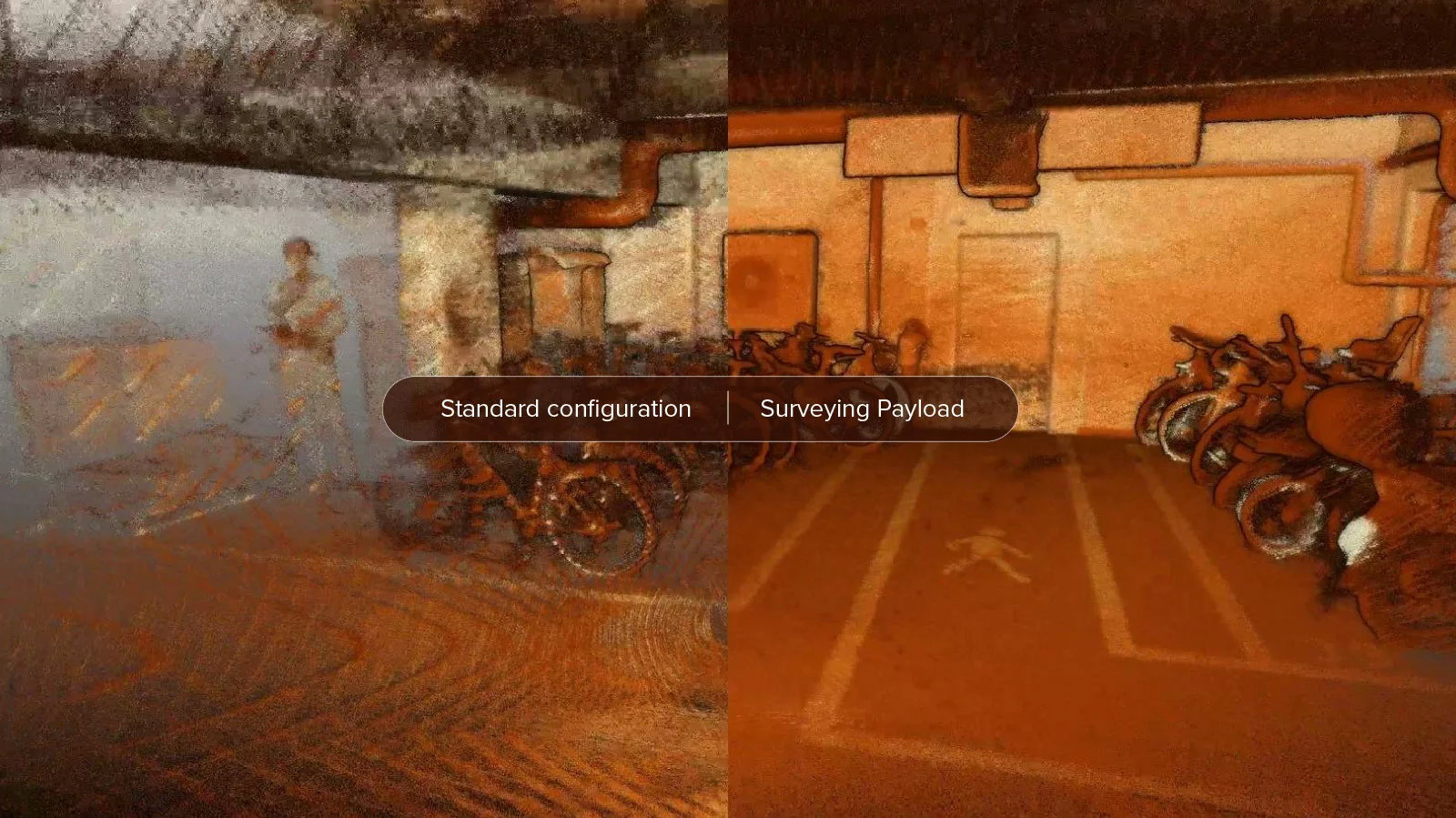
1.點雲厚度優化
點雲是由大量的離散點組成的三維資料集,常用於描述地形、建築物或其他物體的表面形狀。受環境、設備等因素的影響,外業飛行採集的原始點雲數據中容易出現雜訊、分層、厚度過厚等問題。
大疆智圖點雲精度最佳化、點雲平滑等功能,提高地形表面點雲的精度和一致性,減少資料中的雜訊和異常點,達到點雲表面更平滑、點雲資料品質更優的效果。此前,大疆智圖已透過提升精度優化功能,優化了點雲精度、點雲分層問題。
精準度優化前後對比,改善精準度、分層問題
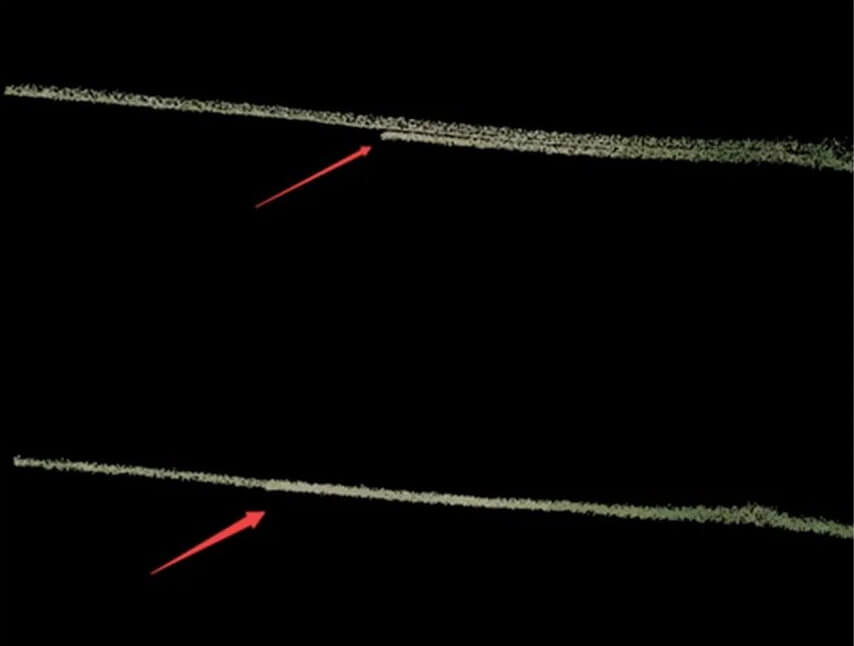
此次更新,大疆智圖點雲平滑演算法再升級,採用全新點雲融合演算法,最佳化後點雲厚度為原始點雲厚度的三分之一左右。

點雲厚度前後對比,點雲平滑後點雲較薄
2.新增支援點雲高程控制點
大疆智圖支援導入檢查點功能,透過對比檢查點與該點周圍的平均高程,檢查點雲成果高程精度。
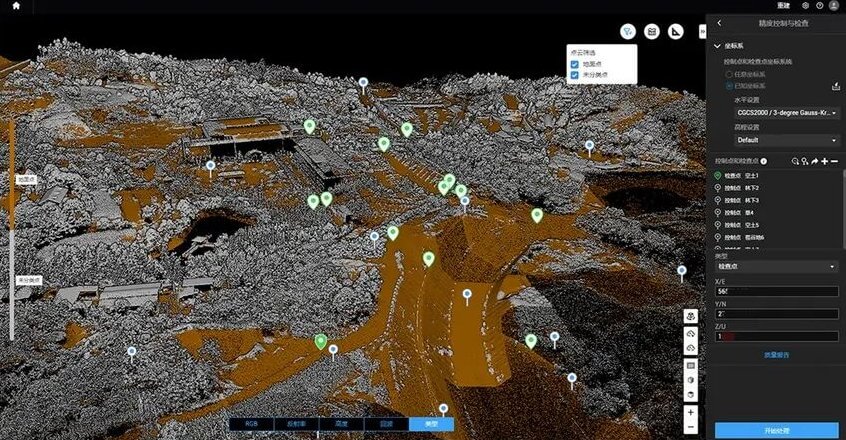
本次智圖新增支援導入高程控制點功能,透過平差擬合演算法,將點雲成果修正到控制點高度,點雲高程控制點可滿足更多成果本地高程系場景的需求。
如專案要求提交 85 黃海高程系成果時,可採集 85 高的高程控制點參與點雲解算即可得到85高點雲成果。
需要注意的是:
①使用點雲高程控制點時,點雲成果輸出座標系與控制點座標系需選擇預設(default),導入控制點後軟件將根據平面位置自動匹配控制點,無需人工刺點。
②佈置控制點和檢查點時,應佈置在平坦空礦的區域,保證控制點和檢查點在一定範圍內保持乾淨平坦無雜物,並避免控制點正上方有遮蔽。
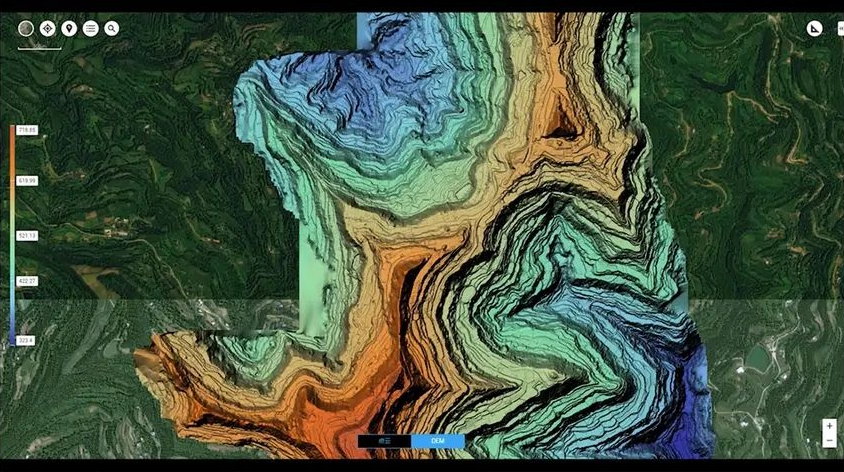
3.點雲品質分析報告
光達點雲品質報告全新改版,支援飛行參數、IMU軌跡誤差、控制點誤差、檢查點誤差等更多重要要參數的輸出。
點雲品質分析報告
其他更新與優化
1.L2自標定
受環境、使用時長等影響,當點雲資料出現規律上色錯誤、點雲分層等現象時,需要對L2負載進行光達自標定。
大疆智圖支援L2自標定,依照要求擷取標定數據後,導入大疆智圖,使用場景選擇光達自標定,即可在工程資料夾terra_lidar_cali下生成標定文件.tar文件,將該文件拷貝至 L2 的 SD卡後,插入 L2 通電 5 分鐘後即可完成自標定。
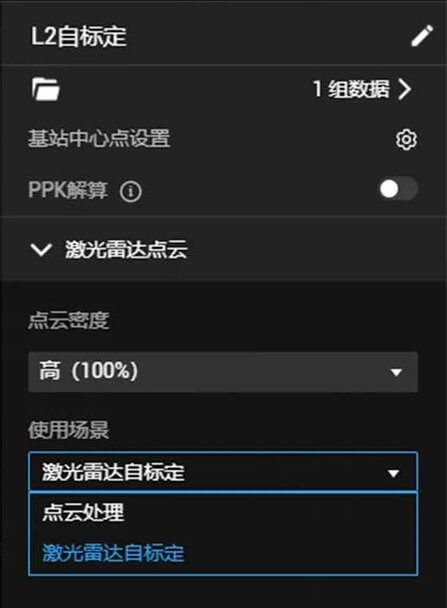
禪思L2自標定
2.空三導出連接點
大疆智圖新增支援帶空三連接點的 XML 空三檔案導出,用戶使用大疆智圖進行空三時,選擇輸出 XML 文件後,XML 檔案將包含空三連接點,匯入第三方軟體後無需額外的連接點生成步驟即可開始三維重建任務。

XML 匯出與檔案產生位址
更新詳情
【新增】
- 支持禪思L2負載資料處理。
- 支援開啟PPK解算功能(僅支援禪思L2負載在中國大陸內拍攝/掃描的素材)。
- 支持禪思L2負載自標定,禪思L1自標定選項更名為光達自標定,選擇光達自標定可自標定禪思L1和2。
- 支援光達點雲重建任務導入高程控制點,精度檢查詢入口改名為精度控制與檢查。
- 支援可見光重建任務空三導出包含連接點及影像位姿的XML文件,可匯入部分第三方軟體進行二/三維重建。
- 光達點雲品質報告全新改版,支援飛行參數、IMU軌跡誤差、檢查查點均方根誤差等更多參數的輸出。
【最佳化】
- 最佳化點雲平滑功能,開啟後點雲厚度可減少為V3.8.0 版本的 1/3 左右。
【問題修復】
- 修復相機資訊功能未主動設定相機參數時,一個文件夾中存在多個相機或不同影像解析度的影像資料時重建效果不佳或報1005錯誤的問題。
- 修復V3.8.0版光達點雲任務無成果時標註與測量工具無法法使用的問題。
【注意事項】
- V3.5.0以上版本所建立的七參數轉換與使用新增部分國家坐標系重建任務,如返回V3.4.4及之前版本查看,任務成果無法正常顯示和使用標註測量功能。
- V3.8.0版本及以後,官網免費試用許可證使用雷射雷達點雲重建任務收費功能時最大導入素材不可超過8G。
- V3.9.0版本及以後,必須具備NVIDIA顯示卡,否則無法取得許可證。
- 光達點雲任務的PPK解算功能必須連網使用,請在拍攝/掃描素材後三個月內進行解算。
- 光達點雲任務導入高程控制點時,輸出座標系與控制點高程座標系需選擇預設。
- 可見光重建任務中,空三導出連接點功能(空三導出附帶完整空三資訊的XML檔)不支援匯出到大地坐標系(WGS84等),可導出至局部(LocalENU)或投影座標系(WGS84UTMzone49N等)。