本文的重點是在大型工業倉庫中測試的全局精度和地理參考精度。查看我們在本文中的辦公空間測試的系統精度和本地精度測試結果。
注意:本文的前兩部分(介紹和我們執行這些測試的原因)與本文和上面提到的相同。如果您已閱讀其他白皮書,我們建議您從下面的“定義我們的條款”部分開始閱讀。
測試結果概述
- 測試了什麼。由 Flyability 的 Elios 3 收集並使用 GeoSLAM Connect 處理的 LiDAR 數據的 3D 模型的系統全局精度和地理參考精度。
- 誰做的測試。GeoSLAM 3D 地圖專家和 Flyability 產品團隊成員。
- 進行了哪些測試。使用 70 米 x 40 米的同一大型地下設施的 Elios 3 捕獲了三個掃描,並使用 GeoSLAM Connect 進行了處理。設施中設置了 15 個目標,並使用質心提取腳本進行準確性評估。
- 參考模型。用於測試的參考模型是使用 TLS(地面激光掃描)Riegl VZ-400 製作的,註冊過程是使用 RiScan Pro V2.14.1 進行的。
- 測試結果——全局準確度。三個掃描中目標到目標距離與參考模型的 RMSE 為 35mm,MAE 佔距離的百分比為 0.16%。
- 測試結果——全球地理參考精度(雲到雲對齊)。當僅使用參考模型的一個角對齊掃描時,三次掃描中目標與參考模型的平均 RMSE 為 110 毫米。
- 測試結果——全球地理參考精度(基於目標的對齊)。當掃描與 4 個目標對齊時,三個掃描中目標的平均 RMSE 與參考模型相比為 65 毫米。
|
介紹
在過去幾年中,LiDAR 數據已迅速成為創建精準 3D 模型的最可靠基礎之一。
採礦、建築和基礎設施等行業正在使用這些模型進行例行檢查、做出安全決定、跟踪資產隨時間的變化並支持項目規劃。
這些行業的專業人員從使用LiDAR 數據製作的 3D 模型中獲得的輸出類型包括詳細的數字孿生、準確的 2D 和 3D 測量、查明資產內缺陷位置的能力、將數據導出到通用 3D 點雲文件的能力*.e57、*.las、*.laz 和 *.ply 等擴展名,以及合併多個地理參考 3D 模型以跟踪資產隨時間變化的能力。
無論行業或產出如何,模型的質量都是其實用性的關鍵。如果數據不精確和不准確(在 3D 建模中具有特定定義的術語,將在下面的單獨部分中介紹),那麼它可能無法很好地代表現實世界,無法提供有價值的見解。
本文介紹了 GeoSLAM 專家和 Flyability 產品團隊進行的測試的結果,這些測試重點介紹了使用 Elios 3 和 GeoSLAM Connect 創建的 3D 模型的結果,以識別全球精度和地理參考精度,與領先的 ZEB Revo 和 ZEB Horizon 相比市場上的移動地圖系統。
為什麼我們進行這些測試
Flyability 的 Elios 3 配備了 Ouster 的 OS0-32 LiDAR 傳感器和執行SLAM(同時定位和映射)的能力,這意味著它可以在飛行中實時創建 3D 模型。
飛行後,Elios 3 用戶可以使用 GeoSLAM Connect 處理他們收集的 LiDAR 數據,以創建精確、準確的 3D 模型。
3D Live Model 和後處理模型有不同的用途,不應該被視為同一種3D 模型。雖然 3D 實時模型可在任務期間用於導航、路線規劃和驗證掃描覆蓋範圍,但您使用 GeoSLAM Connect 製作的後處理模型可以提供準確的點雲。
使用 GeoSLAM Connect處理Elios 3 的 LiDAR 數據,為 Flyability 的現場測試碰撞容限技術增加了創建精確、準確的 3D 映射的能力,以在密閉空間工作,從而有效地映射難以進入的環境。
但潛在的 Elios 3 用戶可能會對 Flyability 的室內無人機技術配備 LiDAR 有效載荷並且數據經過後處理時會發生什麼有疑問,例如:
- 無人機的振動或灰塵或濕氣等環境因素是否會影響生成的 3D 模型的精度?
- 生成的 3D 模型會是什麼樣子,它們會有多大用處?
為了解決這些問題,我們對使用 GeoSLAM Connect 處理的 Elios 3 點雲的全局精度和地理參考精度進行了全面分析。所有測試均以既具有代表性又可重複的方式進行。
定義我們的術語:3D 映射中的全局精度、地理參考精度和漂移
3D 建模中的全局精度與點雲中兩點之間的距離有關,其中無法從單個位置查看對象(例如,兩個房間之間的距離)。
地理參考精度是全局精度加上對齊方法造成的不准確性。對齊方法包括基於目標的配準和迭代最近點 (ICP)。
漂移是 3D 建模中用來描述全局精度的術語。全局精度不能輕易用絕對值(例如,+-2cm/.79 英寸)表示,因為在沒有地面控制點或 GNSS 的情況下,絕對誤差通常會隨著資產的大小或距離的增加而增加。測量。
例如,30m(98.4 英尺)測量的誤差可能小於 300m(984 英尺)距離測量的誤差,因為移動掃描儀在資產中移動會在先前的錯誤之上累積錯誤,其行進時間越長並記錄數據。這種誤差在距離上的累積用詞漂移來描述,代表數據收集期間行進距離的百分比——例如,300 米(984 英尺)距離上的 1% 漂移對應於 3 米(9.84 英尺)誤差到現實。
使用 Elios 3 進行全球精度和地理參考精度評估
為了評估使用 GeoSLAM Connect 處理的 Elios 3 點雲的全局精度和地理參考精度,GeoSLAM 3D 地圖專家和 Flyability 產品團隊在工業工廠內進行了測試。
繼續閱讀以獲得測試的詳細信息,並了解結果。
建立控制在評估任何系統的準確性時,必須使用第二個測量系統來提供基準值(即控制),並且該系統必須比被測系統具有更高的準確性。
為了測試像 Elios 3 這樣的移動測繪解決方案的準確性,行業標準是使用全站儀 (TPS) 或地面激光掃描儀 (TLS) 作為對照,因為這兩種方法的準確性都超過了移動地圖解決方案。
TPS 和 TLS 方法比移動映射解決方案獲得更高準確性的原因是,它們各自從單個固定位置捕獲數據,並使用點匹配算法將多個位置註冊在一起。
相比之下,像 Elios 3 這樣的移動測繪解決方案在收集數據時不斷移動,在無人機穿過其測繪環境時捕獲多個位置的數據。
我們執行的全球精度和地理參考精度測試依賴於地面激光掃描儀 (TLS) 收集的數據作為控制。需要注意的是,由於資產的規模,控制花費了六個多小時的時間來獲取數據。相比之下,Elios 3 需要 8.5 分鐘來獲取數據。
測試環境 為了評估使用 GeoSLAM Connect 處理的 Elios 3 點雲的全局精度和地理參考精度,LiDAR 數據是在位於瑞士弗里堡的一家名為 Blue Factory 的工廠中捕獲的。
該工廠由 12 個大小不一的房間組成,由幾個門口隔開,呈現出適合 Elios 3 的典型工業環境。

測試環境中的一個房間
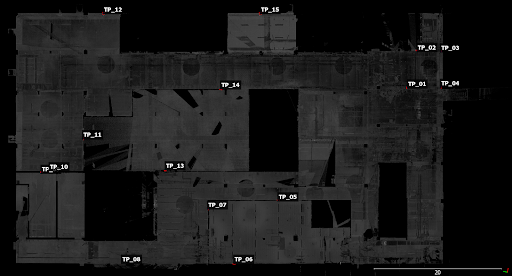
圖 1. 整個測試環境概覽
15 個 3M 級反光金剛石(9.84 英尺)目標(200 毫米 x 200 毫米/7.87 英寸 x 7.87 英寸)均勻放置在測試環境周圍,如下面的兩張圖片所示:

收集數據
使用 Elios 3 進行了三次掃描以捕獲用於測試的 LiDAR 數據,所有掃描都遵循相同的近似飛行路徑以確保結果之間的一致性。
所有掃描都在同一位置開始和結束,這既是為了保持一致性,也是為了確保按照建議關閉數據捕獲循環。SLAM 數據捕獲的最佳實踐是通過在捕獲內執行循環並從側面進入門口來維護的,以確保在進入新環境時具有良好的可視化效果。
這三次掃描的平均飛行時間為 8 分 30 秒,每次掃描在約 450 米(1,476 英尺)的飛行路徑上捕獲了 1.08 億個點。
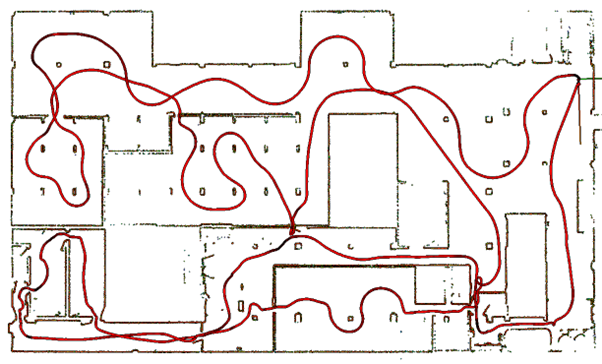 圖 2. 無人機在測試環境中的飛行路徑
圖 2. 無人機在測試環境中的飛行路徑
觀看此視頻以查看無人機飛行路徑的加速記錄:
數據處理和質心提取
為確保測試能夠代表最終用戶對系統的期望,使用 GeoSLAM Connect 2.1.1 中的標準飛行能力處理參數執行處理。數據沒有通過任何其他方式重新處理,也沒有被抽取或過濾。
作為後處理步驟,運行提取工具* 以識別 Elios 3 數據和 TLS 數據中的 15x 目標。識別目標後,該工具提取目標的質心,為 Elios 3 和 TLS 數據提供 15x 質心。TLS 數據的質心用作控制點,Elios 3 質心用於比較。
*注意:此提取工具將在 GeoSLAM Connect 2.3.0 中可用。
評估全局精度——距離測量
為了評估 Elios 3 的全局精度,進行了距離測量,並將 Elios 3 數據與 TLS 控制數據進行了比較。
為完成該過程而執行的步驟是:
- 距離測量。為控制 TLS 數據和 Elios 3 掃描測量分散的成對質心陣列之間的距離。
- 求殘差。在 TLS 數據的點對距離和 Elios 3 點對距離之間發現了殘差。
- 求均方根誤差。計算與 3 次掃描的殘差的每個距離的殘差的 RMSE(均方根誤差)。
- 求 RMSE 作為長度的百分比。計算殘差的 RMSE 作為質心之間距離的百分比。
- 找出平均誤差。最後,計算殘差的 RMSE (MAE) 的平均值作為質心之間距離的百分比。
用於查找殘差的質心對以及 RMSE、作為長度百分比的 RMSE 和 MAE 如下圖 3 所示。
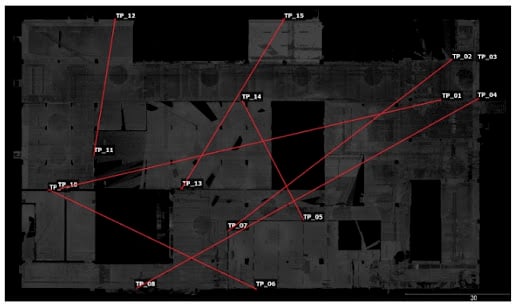 圖 3. 用於全局精度評估的點對
圖 3. 用於全局精度評估的點對
全局精度結果
使用 GeoSLAM Connect 處理時,Elios 3 數據的全局精度評估結果提供了 35 毫米(1.38 英寸)的全局精度 RMSE,或 0.16% 的漂移(相對於被測距離的平均誤差)。
|
|
殘差 dXYZ |
|
|
|
| 聯絡線 |
掃描 1
|
掃描 2
|
掃描 3
|
均方根誤差 |
長度 (VZ400) |
RMSE % 長度 |
| TP01-TP08 |
0.0005
|
0.0119
|
0.0326
|
0.0200
|
52.60
|
0.0381
|
| TP02-TP07 |
0.0066
|
0.0071
|
0.0060
|
0.0066
|
41.11
|
0.0160
|
| TP04-TP08 |
0.0284
|
0.0183
|
0.0164
|
0.0217
|
57.15
|
0.0379
|
| TP05-TP14 |
0.0351
|
0.0292
|
0.0079
|
0.0268
|
19.69
|
0.1359
|
| TP07-TP09 |
0.0661
|
0.0496
|
0.0992
|
0.0746
|
26.73
|
0.2789
|
| TP11-TP12 |
0.0259
|
0.0540
|
0.0571
|
0.0478
|
19.88
|
0.2403
|
| TP14-TP15 |
0.0558
|
0.0517
|
0.0483
|
0.0520
|
13.34
|
0.3898
|
|
|
|
均方根誤差
|
0.0356
|
平均工資 (%)
|
0.1624
|
評估地理配準精度——起飛前後的雲對雲對齊
在上一節中,我們討論了系統的全局精度。在本節中,我們將評估第一種配準方法——起飛位置周圍的雲到雲對齊。
地理配準精度評估系統的全局精度以及所用地理配準技術的精度。
為了模擬 Elios 3 掃描的常見用例,Elios 3 點雲與起飛位置周圍的參考模型對齊。這樣做模擬了在無法進入的區域執行任務期間可能遵循的程序,其中 Elios 3 用於完成現有的地理參考模型,並且控件只能放置在飛行的起始位置。
僅在掃描環境的一個部分進行控制會導致配準過程中的任何不准確性在整個掃描過程中傳播,並且與在整個掃描過程中使用目標或地面控制點 (GCP) 相比會導致不准確性增加。
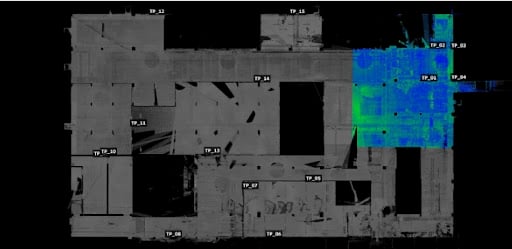
圖 4. TLS 參考模型,其中覆蓋了 Elios 3 掃描的 15 米(49.2 英尺)部分,用於雲到雲對齊
為了使用 GeoSLAM Connect 評估 Elios 3 的雲到雲對準精度,實施了以下工作流程:
- 起飛位置周圍 15 米(49.2 英尺)的掃描部分用於執行雲到雲的配準。
- TLS 數據的 15 米部分用作參考,Elios 3 數據的 15 米部分使用雲到雲對齊與參考對齊。然後將此對齊應用於整個 Elios 3 點雲。
- 來自 TLS 數據的參考質心被記錄下來並與對齊的 Elios 3 質心進行比較。
- 計算參考質心和對齊質心之間的殘差。
- 為每個參考點計算 3 次掃描的 dXY 和 dXYZ 的 RMSE。
- 輸出 dXY 和 dXYZ 的平均 RMSE 值。
結果
評估雲到雲對齊和全局準確性的結果被拆分以顯示 dXY 和 dXYZ 的 RMSE。結果表明,僅使用掃描的一部分而不是整個掃描進行配準會增加不准確性。
dXY 雲到雲結果可以在這裡看到:
|
|
dXY 結果 |
|
|
|
| 目標 |
掃描 1
|
掃描 2
|
掃描 3
|
均方根誤差 |
|
|
| TP001 |
0.0213
|
0.0344
|
0.0444
|
0.0347
|
|
|
| TP002 |
0.0338
|
0.0154
|
0.0315
|
0.028
|
|
|
| TP003 |
0.0081
|
0.0059
|
0.0060
|
0.0068
|
|
|
| TP004 |
0.0195
|
0.0386
|
0.0372
|
0.0329
|
距離
|
漂移
|
| TP005 |
0.0310 |
0.0310
|
0.0617
|
0.0418
|
45
|
0.09%
|
| TP006 |
0.0182
|
0.0751
|
0.0488
|
0.0528
|
56
|
0.09%
|
| TP007 |
0.0186
|
0.0214
|
0.0256
|
0.0221
|
50
|
.04%
|
TP008
|
0.0258
|
0.0317
|
0.0373
|
0.0319
|
68
|
.05%
|
| TP009 |
0.0666
|
0.1057
|
0.1100
|
0.0961
|
88
|
.11%
|
| TP010 |
0.0658
|
0.0969
|
0.1526
|
0.1110
|
73
|
.15%
|
| TP011 |
0.0867
|
0.0210
|
0.0560
|
0.0608
|
69
|
.09%
|
| TP012 |
0.0541
|
0.0558
|
0.0901
|
0.0687
|
57
|
.12%
|
| TP013 |
0.0282
|
0.0385
|
0.0539
|
0.0416
|
50
|
.08%
|
| TP014 |
0.0425
|
0.0640
|
0.0591
|
0.0560
|
35
|
.16%
|
| TP015 |
0.0159
|
0.0098
|
0.0071
|
0.0115
|
30
|
.04%
|
|
|
|
均方根誤差
|
0.0543
|
漂移
|
0.09%
|
dXYZ 雲到雲結果可以在這裡看到:
|
|
dXYZ 結果 |
|
|
|
| 目標 |
掃描 1
|
掃描 2
|
掃描 3
|
均方根誤差 |
|
|
| TP001 |
0.0266
|
0.0395
|
0.0488
|
0.0394
|
|
|
| TP002 |
0.0526
|
0.0228
|
0.0438
|
0.0416
|
|
|
| TP003 |
0.0148
|
0.0191
|
0.0064
|
0.0145
|
|
|
| TP004 |
0.0260
|
0.0396
|
0.0396
|
0.0357
|
距離
|
漂移
|
| TP005 |
0.0627 |
0.0460
|
0.0640
|
0.0582
|
45
|
0.13%
|
| TP006 |
0.0212
|
0.0769
|
0.0490
|
0.0541
|
56
|
0.10%
|
| TP007 |
0.0393
|
0.0215
|
0.0367
|
0.0335
|
50
|
.07%
|
TP008
|
0.1368
|
0.1256
|
0.2081
|
0.1610
|
68
|
.24%
|
| TP009 |
0.1475
|
0.2231
|
0.2247
|
0.2017年
|
88
|
.23%
|
| TP010 |
0.1825
|
0.1440
|
0.2170
|
0.1836
|
73
|
.25%
|
| TP011 |
0.1786
|
0.1172
|
0.1609
|
0.1544
|
69
|
.22%
|
| TP012 |
0.1648
|
0.1382
|
0.1975
|
0.1686
|
57
|
.30%
|
| TP013 |
0.0951
|
0.0938
|
0.1092
|
0.0996
|
50
|
.20%
|
| TP014 |
0.0847
|
0.0736
|
0.0923
|
0.0839
|
35
|
.24%
|
| TP015 |
0.0277
|
0.0139
|
0.0433
|
0.0307
|
30
|
.10%
|
|
|
|
均方根誤差
|
0.1104
|
漂移
|
0.19%
|
評估地理配準註冊精度——基於目標的對齊與四個模型範圍的 GCP
為了模擬將 Elios 3 點雲參考到一組地面控制點 (GCP) 的替代用例,進行了基於目標的對齊。執行的對齊是剛性轉換。
評估基於目標的準確性將包括系統的準確性和基於目標的註冊過程的準確性。
這種方法模擬了一個用例,在該用例中,Elios 3 用於掃描一個環境,該環境包含已知特徵或位於不同位置的控制點,而不僅僅是起飛位置。
為了進行對齊過程,應用了以下方法:
- 在掃描周邊選擇了四個目標——一個目標分別來自數據集的北部、南部、東部和西部。使用了目標控制點 3、6、11 和 14(參見下面的圖 5)。
- 四個 TLS 目標的質心用作參考點。
- 來自 Elios 3 掃描的相同四個目標的質心與四個參考點對齊。
- 為所有 15x 目標計算了 TLS 質心和 Elios 3 質心之間的 dXY 和 dXYZ 殘差。
- 計算了所有掃描的每個目標的 RMSE。
- 為每次掃描計算 RMSE,並為 dXY 和 dXYZ 計算基於目標的對齊精度的總體平均 RMSE 值。
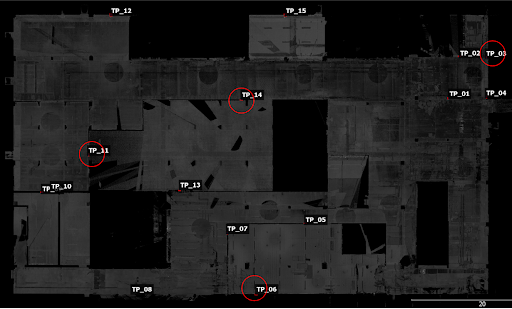
圖 5. 掃描外圍的四個目標
結果
由於控制位於點雲 (NSEW) 周圍,不僅在飛行開始位置,而且對註冊過程應用了更嚴格的約束。
與雲到雲對齊過程相比,這些約束有助於提高配準過程的準確性,在雲到雲對齊過程中,僅使用起始位置周圍 15 米(49.2 英尺)的掃描部分來對齊點雲。在這種情況下,用戶可以在掃描周圍的不同位置放置控件。
與僅使用飛行起始位置周圍 15 米部分的雲到雲參考過程相比,使用掃描周邊四個點的基於目標的配準可使配準點雲的準確性提高 28% .
應該注意的是,如果在 SLAM 處理中使用 GCP,將會獲得更準確的模型。此功能計劃集成到 GeoSLAM Connect 的未來版本中。
評估基於目標的比對的結果被拆分以顯示 dXY 和 dXYZ 的 RMSE。下表顯示 dXY 的 RMSE 低於 dXYZ 結果,正如預期的那樣。
基於 dXY 目標的結果可以在這裡看到:
|
|
dXY 結果 |
|
| 目標 |
掃描 1
|
掃描 2
|
掃描 3
|
均方根誤差 |
| TP001 |
0.0742
|
0.0523
|
0.0549
|
0.0612
|
| TP002 |
0.0959
|
0.0293
|
0.0326
|
0.0609
|
| TP003 |
0.0757
|
0.0215
|
0.0167
|
0.0465
|
| TP004 |
0.0612
|
0.0158
|
0.0258
|
0.0394
|
| TP005 |
0.0392 |
0.0142
|
0.0525
|
0.0387
|
| TP006 |
0.0307
|
0.0537
|
0.0452
|
0.0442
|
| TP007 |
0.0194
|
0.0079
|
0.0236
|
0.0182
|
TP008
|
0.0163
|
0.0560
|
0.0155
|
0.0348
|
| TP009 |
0.0447
|
0.1105
|
0.1294
|
0.1016
|
| TP010 |
0.0608
|
0.1199
|
0.1327
|
0.1091
|
| TP011 |
0.0578
|
0.0248
|
0.0583
|
0.0495
|
| TP012 |
0.0056
|
0.0682
|
0.0684
|
0.0559
|
| TP013 |
0.0227
|
0.0349
|
0.0334
|
0.0308
|
| TP014 |
0.0583
|
0.0621
|
0.0425
|
0.0550
|
| TP015 |
0.0598
|
0.0122
|
0.0149
|
0.0363
|
|
|
|
均方根誤差
|
0.0573
|
基於 dXYZ 目標的結果可以在這裡看到:
|
|
dXYZ 結果 |
|
| 目標 |
掃描 1
|
掃描 2
|
掃描 3
|
均方根誤差 |
| TP001 |
0.0820
|
0.0523
|
0.0562
|
0.0649
|
| TP002 |
0.0962
|
0.0304
|
0.0460
|
0.0640
|
| TP003 |
0.0908
|
0.0216
|
0.0185
|
0.0549
|
| TP004 |
0.0827
|
0.0305
|
0.0280
|
0.0534
|
| TP005 |
0.0727 |
0.0302
|
0.0599
|
0.0571
|
| TP006 |
0.0308
|
0.0538
|
0.0454
|
0.0444
|
| TP007 |
0.0234
|
0.0258
|
0.0299
|
0.0265
|
TP008
|
0.0480
|
0.0992
|
0.1391
|
0.1025
|
| TP009 |
0.0593
|
0.1365
|
0.1392
|
0.1176
|
| TP010 |
0.0610
|
0.1202
|
0.1333
|
0.1094
|
| TP011 |
0.0579
|
0.0251
|
0.0598
|
0.0502
|
| TP012 |
0.0212
|
0.0742
|
0.0685
|
0.0596
|
| TP013 |
0.0228
|
0.0437
|
0.0357
|
0.0351
|
| TP014 |
0.0583
|
0.0697
|
0.0454
|
0.0587
|
| TP015 |
0.0764
|
0.0925
|
0.0570
|
0.0767
|
|
|
|
均方根誤差
|
0.0698
|
|
|
|
梅
|
0.0650
|
結論
測試結果表明,使用 GeoSLAM Connect 處理的 Elios 3 點雲精度高,是滿足測量要求的合適工具,全局系統精度為 35 毫米(1.38 英寸)。
除了系統精度外,Elios 3 的地理配準功能還通過模擬現場實踐進行了評估。
雲到雲和基於目標的對齊評估展示了 Elios 3 如何在地圖和地理配準無法訪問的環境中輕鬆實施,並實現高達 60 毫米(2.36 英寸)的地理配準精度。