DJI大疆智圖再升級| 全面支持第三方相機、點雲平滑等新功能上線
DJI 大疆行業應用
11 月10 日,大疆智圖迎來3.6.0 版本更新,為用戶帶來第三方相機適配、精細化巡檢航線新增適配機型、激光雷達點雲數據處理新增平滑和降噪、導入檢查點等驚喜功能。
一起來先睹為快!
重點新增功能
01
可見光重建適配第三方相機
在新版本中,大疆智圖的可見光重建將適配第三方相機,用戶使用大疆以外品牌的相機/負載採集的數據進行建模時,可以修改相機內參,以提升建模精度。
用戶在導入第三方相機的照片數據時,點擊「相機信息」右側的查看按鈕,即可批量編輯全部照片的相機信息。在使用五相機負載等多鏡頭相機時,如存在多個相機文件夾,可根據每個文件夾單獨設置分別的相機信息。
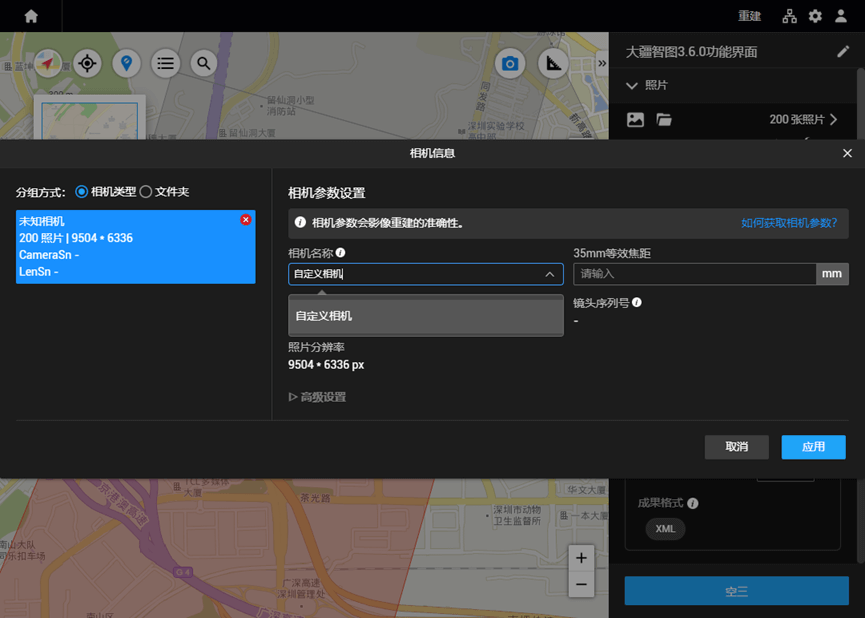
導入第三方相機內參的功能入口
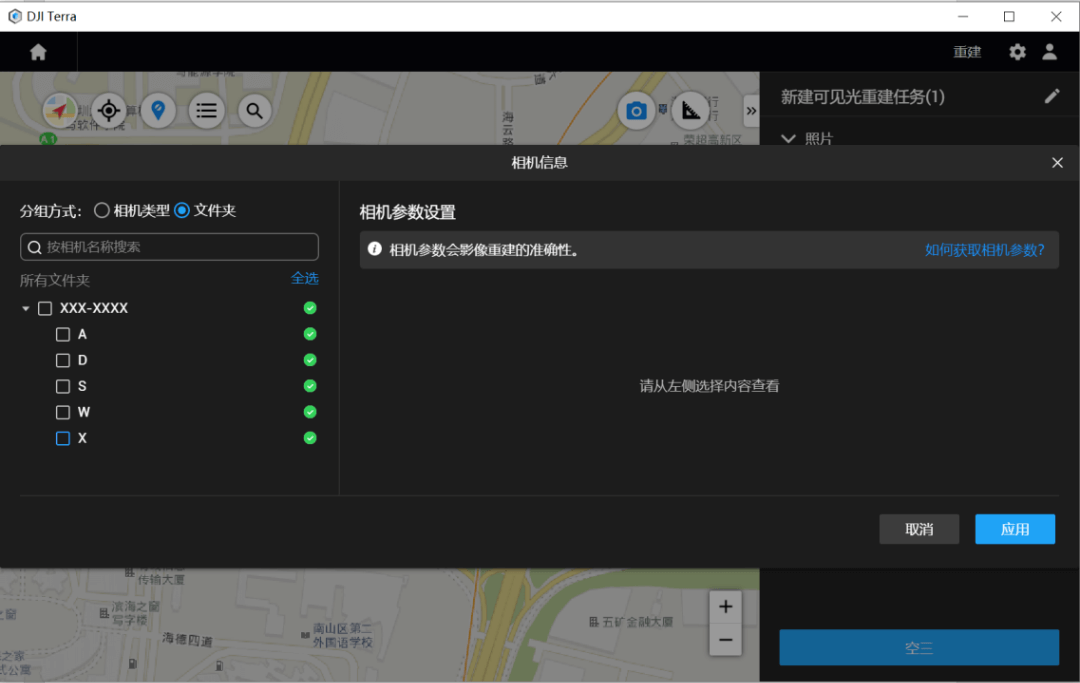
多個文件夾分別設置內參的功能示意
同時,新版本智圖還支持預設相機內參或固定相機內參,解決因相機內參不准確導致建圖精度較差的問題。用戶可以在「相機信息」頁面中,根據從相機廠家獲取的數據,設置對應的相機名稱、35mm 等效焦距等信息。點擊應用即可保存相機信息配置並存儲。已保存的相機信息可通過下拉「相機名稱」列表,選擇並使用。
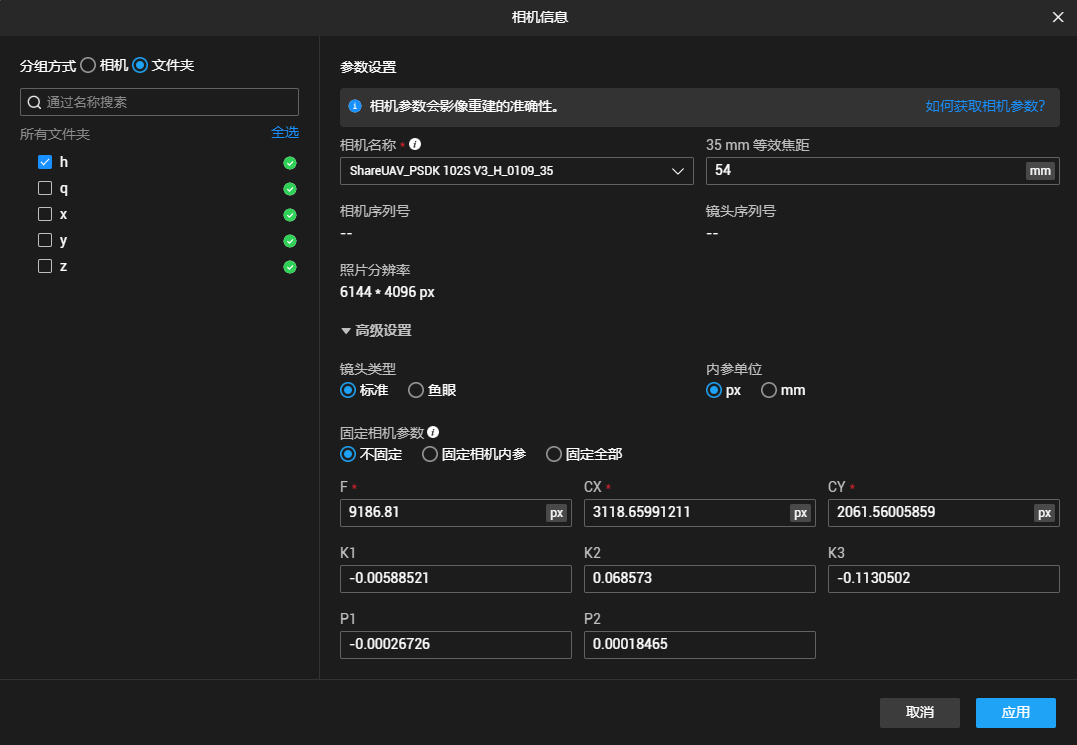
固定相機內參的功能示意
需要注意的是,在預設相機內參時,如果選擇「固定相機內參」,則選擇該相機進行計算時,智圖不會再重新計算F、CX、CY 數據,該項適用於純正射數據(沒有高程優化);而如選擇「固定全部」,則智圖不會再重新計算相機信息,適用於已有最優解內參,如通過高精度標定或已有任務計算得出過最優解內參的情況。
02
精細化巡檢航線新增適配機型
智圖的精細化巡檢模式支持用戶導入智圖三維重建結果模型或第三方LAS 點雲文件,在模型中添加目標點並設置拍攝速度、航線速度等參數,自動生成對應航點後,用戶可以導出KML/KMZ 文件後上傳至DJI Pilot 2 或司空2 中執行任務。適用於桿塔精細化巡檢航線規劃等場景。
此前精細化巡檢模式只支持經緯M300 RTK、精靈4 RTK 、禦2 行業進階版三款機型,版本更新後,將支持經緯M30 系列和Mavic 3 行業系列,用戶可在生成航線後導出KMZ 文件至DJI Pilot 2 或司空2進行作業。
需要注意的是,經緯M30 系列和DJI Mavic 3 行業系列精細化巡檢航線規劃僅支持導出KMZ 文件類型。
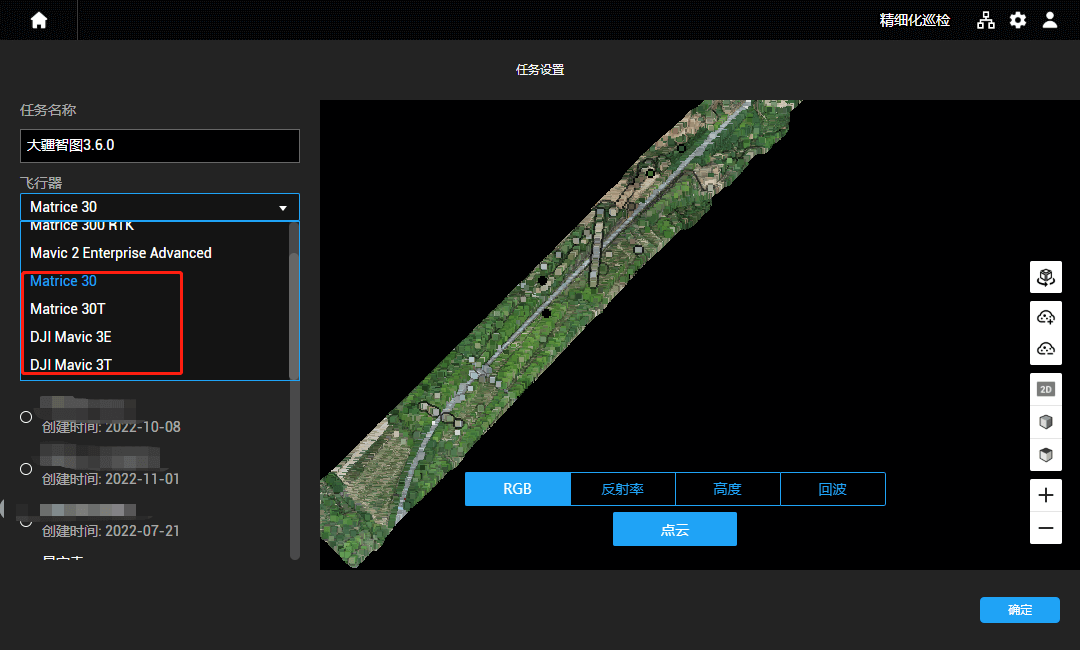
精細化巡檢模式中已新增適配機型
03
激光雷達點雲數據處理新增多項功能
① 點雲平滑
無人機激光雷達進行數據採集時,時常出現點雲過厚的問題。特別是對硬質平面如平地、路面、山坡進行測量時,如激光雷達採集的點雲厚度過厚,地麵點提取效果較差,導致測繪精度不理想。
新版本智圖新增點雲平滑功能,用戶開啟「點雲平滑」後,即可有效壓薄點雲,優化地麵點的提取效果,提升地物特徵的呈現和成果精度。
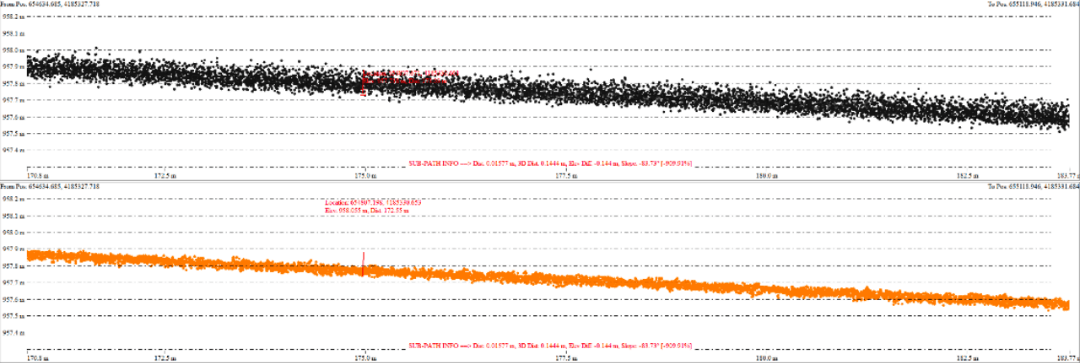
本效果圖中被測物為柏油馬路硬質地面
平滑前點雲厚度約為14.4cm 左右,平滑後降至5cm
② 高程精度檢查
更新後,智圖將支持激光雷達點雲任務導入檢查點,進行高程精度檢查,在質量報告中自動生成高程差報告。該功能的原理是在檢查點周邊一定範圍內,將點雲進行內插,附和到檢查點的平面位置,並對比高程差。因此檢查點應部署在平坦表面,避開牆角等位置。
用戶在「激光雷達點雲-高級設置」中點擊「精度檢查」右側的導入按鈕,完成檢查點的導入,建模後即可在質量報告中獲取檢查結果。
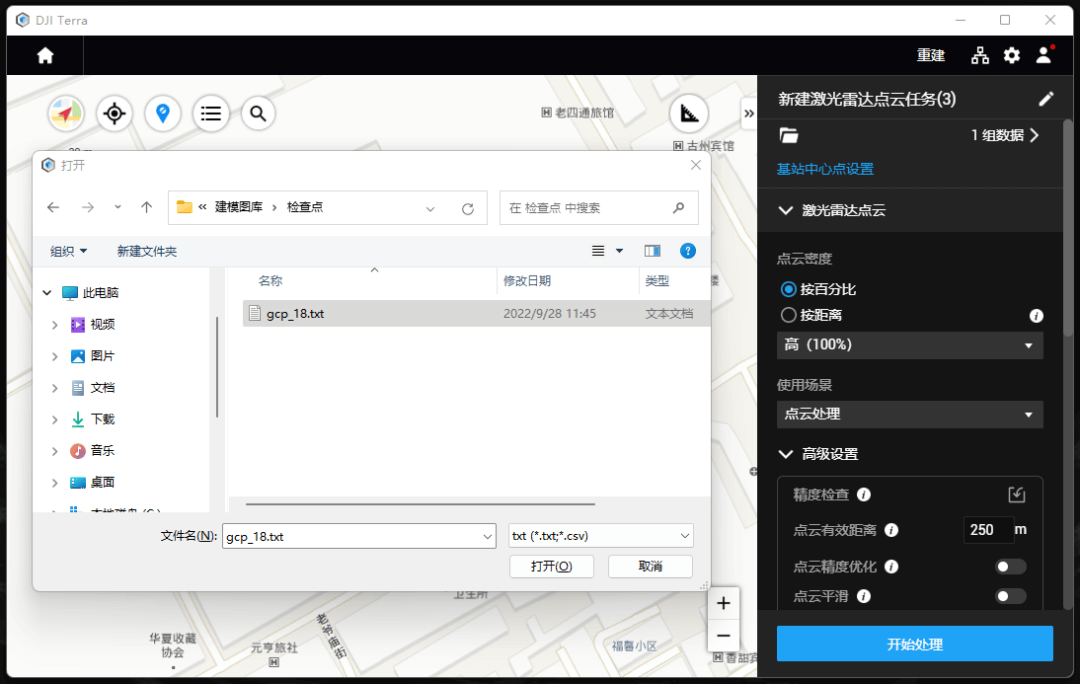
導入檢查點進行高程精度檢查的功能入口
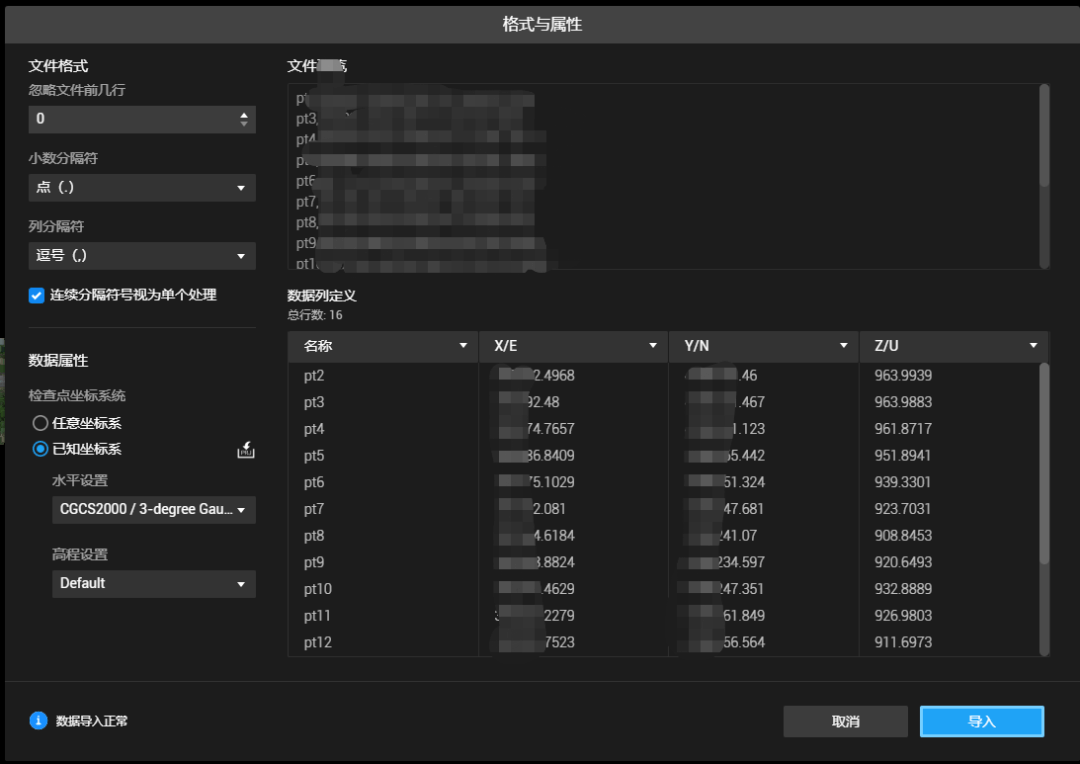
導入檢查點的示意圖
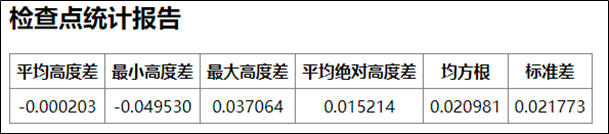
高程精度檢查報告
③ 點云密度支持以物理距離採樣
更新後的智圖支持用戶在點云密度項中設置以物理距離採樣,可在固定的距離範圍內,有效降低點雲的數量,使點云密度更加均勻。
用戶可在「激光雷達點雲-點云密度」中選擇「按距離」,而後設置5-50cm 的點雲採樣距離。需注意的是,如果距離過大則可能產生點雲稀疏的問題,建議根據項目實際需求設置採樣距離。
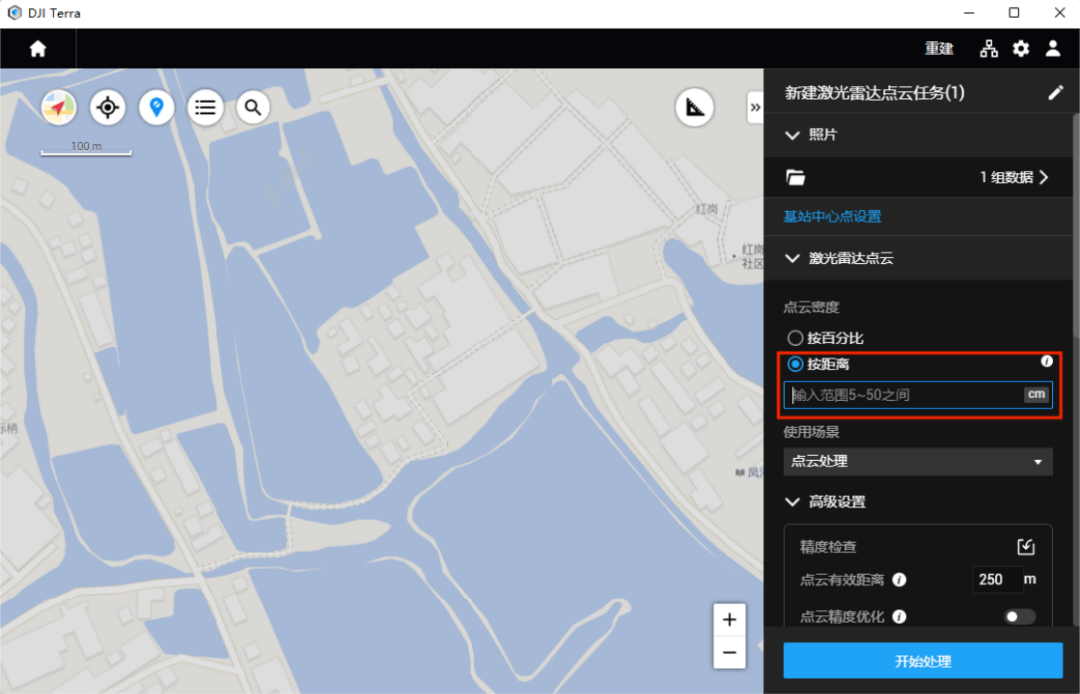
點云密度按物理距離採樣功能入口
重點優化
01
水面場景重建優化
在進行三維重建時,測區內的水面區域往往效果不理想,為後期修模增加工作量。此版本智圖對水面場景重建功能進行了升級,在倒影、漏識別、誤識別上有明顯改善。對此前版本可能出現的水面平整破洞情況,智圖也進行了修復,大幅提升了模型美觀性並降低後期修模成本。
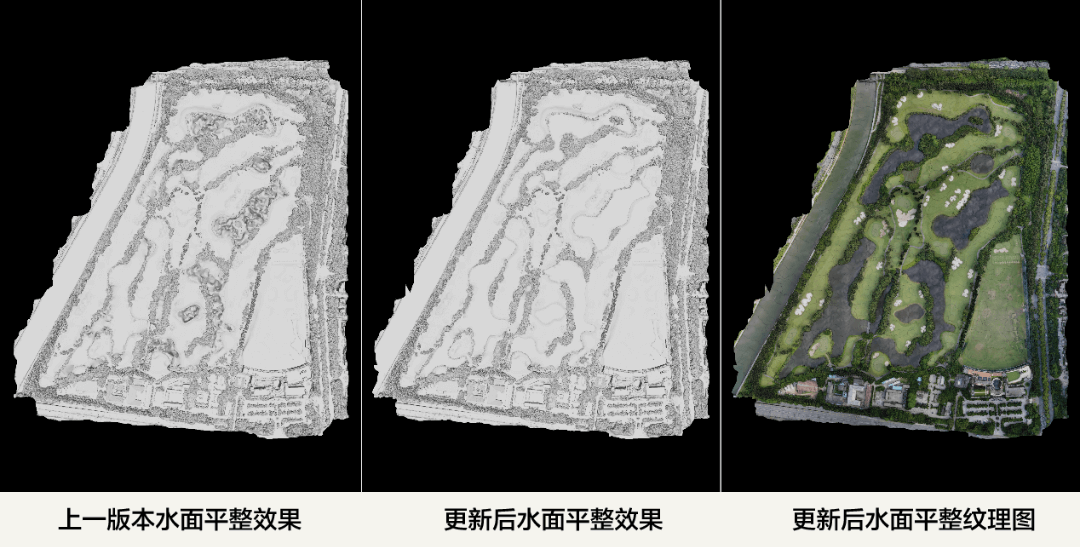
水面平整修復效果對比
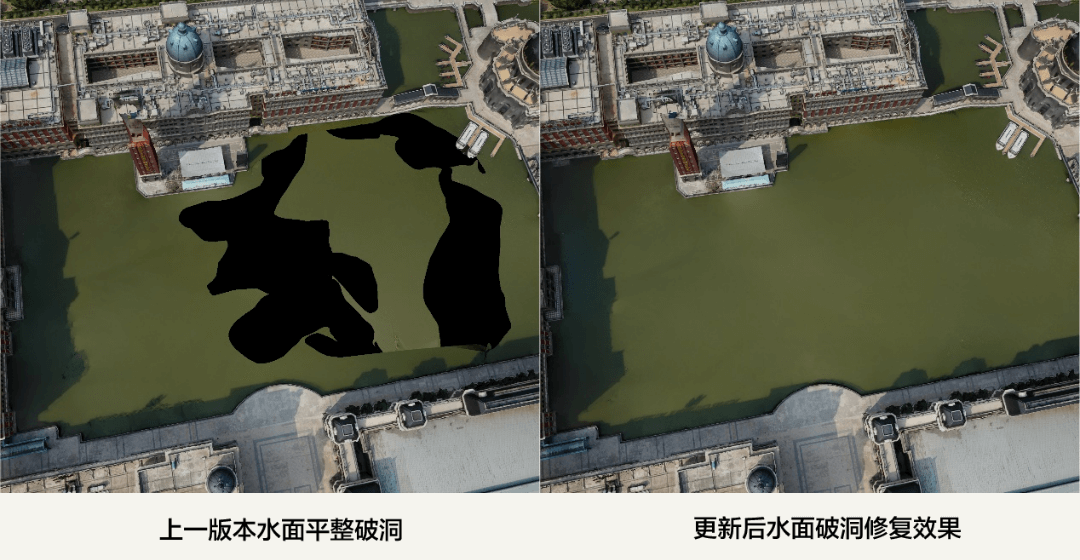
水面破洞修復效果對比
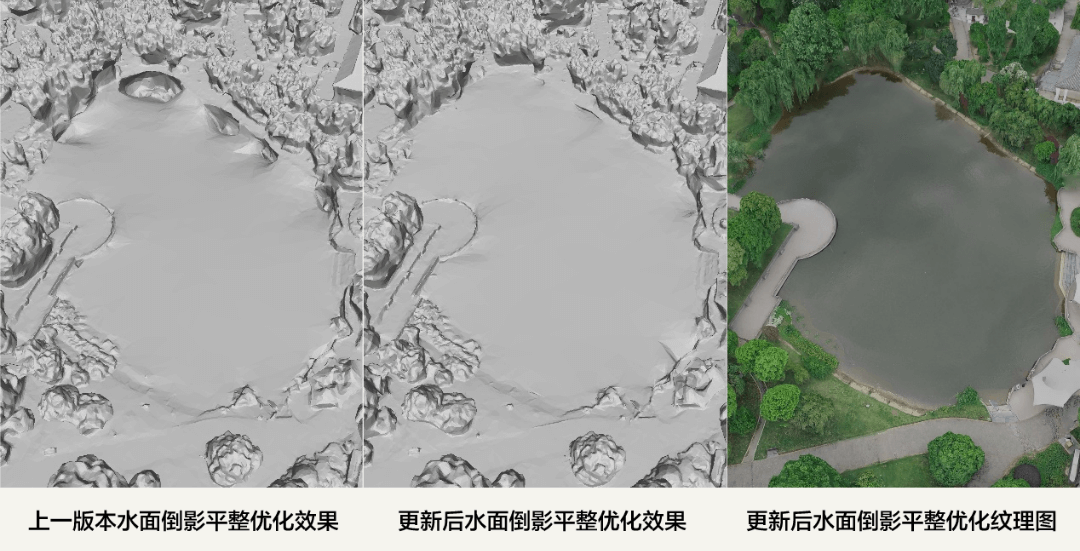
水面倒影平整優化效果對比
02
「光照均勻/去霧」設置
拆分為「光照均衡」、「薄霧優化」
在之前的版本中,因光照均勻和去霧集合在一個功能內,如用戶僅需對模型進行去霧操作,在開啟「光照均勻/去霧」功能後,可能導致重建效果顏色失真。
新版本對該功能進行了拆分,只開啟「光照均衡」時會對重建模型同時進行光照均衡和去霧處理,但如果只開啟「薄霧優化」則僅去霧,不會進行光照均衡。

03
效率提升
新版本智圖的二維單機重建效率相比V3.5.5 版本提升約10% 。
04
二維重建瓦片壓縮
更新後的智圖將優化二維瓦片大小,在不影響模型效果的情況下,文件大小比例壓縮至原本的三分之一。特別是在web 端的加載速度將得到有效提升,有助於優化數據的交互處理和應用效果。
其他優化功能
– 支持單機重建設置「被攝物體距離」參數;
– 優化光照差異比較大的數據源在二維重建時成果的色彩一致性;
– 優化Windows 11( 64 位)操作系統的使用體驗;
– 優化實時重建的穩定性、重建精度及色彩一致性;
– 優化部分輸出坐標系下激光雷達點雲任務的重建速度。
問題修復
– 修復在三維模型標註測量點時,測量點會自動跳轉到其他位置的問題;
– 修復二維重建中偶現DOM 成果內部有黑塊的問題。