DJI 禪思 Zenmuse L1作業參數建議
UTC 無人機培訓中心 崔老師
關於如何使用禪思L1,本文整理了數據採集操作建議參數、大疆智圖內業處理注意事項等內容。其中數據採集注意事項包含作業前註意事項、精度驗證、手動數據採集建議參數、地形測繪場景、河道/交通道路測繪場景、電力線場景等內容。內容基於列表所示固件版本編寫,如後續固件更新,請以最新內容為準。

禪思L1 數據採集操作注意事項
作業中三個動作,提升作業精度
使用差分定位、慣導預熱、慣導校準,作業前的這三個動作能大幅提升作業精度,你一定要掌握。
差分定位
L1點雲數據處理需要獲取厘米級定位精度數據才能解算,在進行作業前必連接網絡RTK並確保作業時RTK全程FIX。如不能保證連接,請架設基站並進行後處理。獲取厘米級定位數據的方法如下:
1、自架基站方案(D-RTK2)
將D-RTK2架設到已知點上,測量桿要落地。M300 RTK設置頁面選擇為D-RTK2,D-RTK2模式切換為模式5,將飛行器與D-RTK2對頻。APP進入高級模式(密碼默認是123456),將D-RTK2坐標修改為已知點的坐標(高程需要在地面已知點高程基礎上加上1米8的儀器高)。
架設D-RTK2基站後,連接D-RTK2飛行,且全程RTK固定解,則L1的成果文件中將自動保存基站文件。
也可在遙控器的RTK設置處將其設置為無,切換GNSS模式飛行。任務採集完成後,使用TypeC線連接D-RTK2,將對應時間段後綴為.DAT的基站文件拷出,放到與點雲原始數據相同的文件夾中,在大疆智圖做數據處理時就能自動進行後差分解算。
2、自架基站方案(第三方RTK設備)
當沒有網絡RTK或易出現網絡RTK空中斷聯時,可將一台第三方RTK基站設備架設到測區已知點上,此時飛行器與RTK基站之間無需連接,飛行完成後,查找相同時間段的基站文件,文件重命名應與L1成果文件中的.RTB文件保持一致,後綴按照以下規則改名,然後將基站文件拷貝至雷達L1成果文件同目錄下。如第三方RTK基站沒有輸入已知點坐標的位置,可以文本形式打開.O格式的基站文件,修改“APPPO POSITION XYZ”坐標值。
L1支持基站協議版本如下(注:重命名文件的文件名DJI_YYYYMMDDHHMM_XXX應與L1成果文件中的.RTB文件名稱保持一致):
表L1支持的RTK協議類型

注意 飛行過程中RTK發生中斷,為確保數 基站架設位置與飛行作業區域最遠端距離在15km以內,並且基站收集數據時間大於飛行作業時間。
慣導預熱
為保證數據採集的精度,L1在起飛前需要開機靜置預熱慣導,預熱時間大概3-5分鐘(實際預熱時間與當前傳感器溫度和環境溫度等因素有關),待聽到預熱完成的提示音後再開始任務。
慣導校準
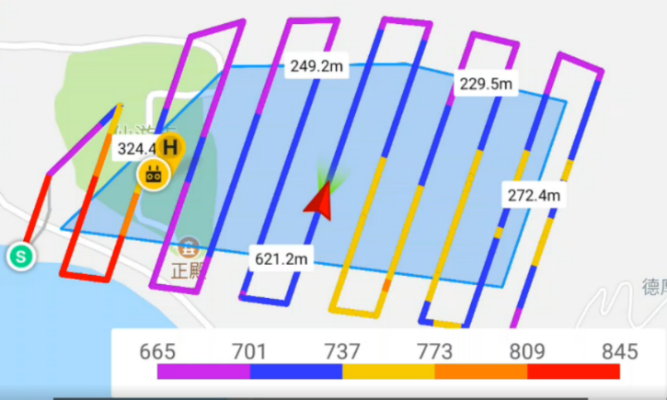
為保證激光雷達慣導精度的一致性,在採集數據前後均需要進行慣導校準。在使用自動數據採集時,在航線參數中打開標定飛行後會在航線起點、終點以及拐彎處(如下圖黃色航線)增加加減速標定飛行,校準激光雷達的慣導精度,提升模型精度。該按鈕默認打開。
勻速飛行過程中,L1的慣導會隨著時間的累積精度不斷下降,建議勻速飛行不超過100s,如設置飛行速度為10m/s,則相鄰航點的距離應小於1000m。
如何進行精度驗證
一般使用全站儀、RTK設備測量若干檢查點來檢核精度。L1的成果是las格式三維點雲,與使用可見光獲取的三維模型不同,點雲沒有結構信息,因此在檢查點佈設時與可見光會有所差別。
檢查點製作方法
L1的點云成果中包含地物反射率信息,可通過反射率的差異判斷出檢查點中心位置。推薦使用高反射率的白色塗料(道路反光漆、高反射隔熱塗料)與低反射率的黑色噴漆相結合製作檢查點,檢查點直徑大於1m * 1m。

檢查點外業佈設示意
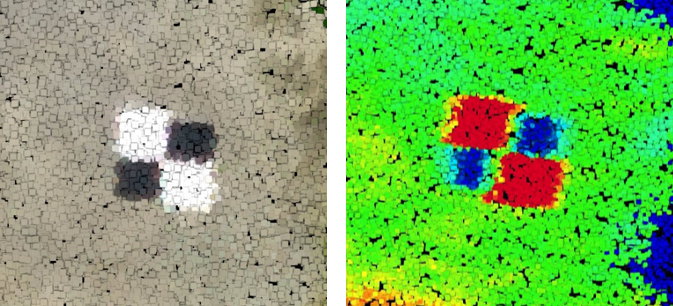
點云成果中檢查點圖標(左可見光;右反射率)
此外,如測區有斑馬線等反射率差異明顯地物,亦可測量其角點作為檢查點。
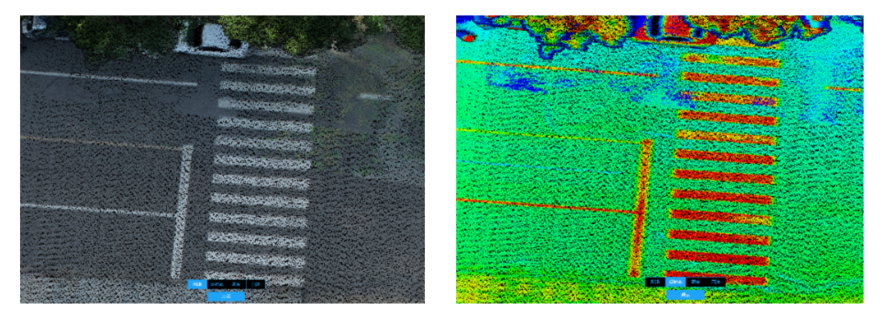
點云成果中斑馬線圖標(左可見光;右反射率)
檢查點佈設
佈設檢查點時,可選擇1m*1m大小的平地,檢查點應均勻分佈在測區四周及中間,檢查點應有高差,不可全部位於同一平面。為了檢驗激光雷達的穿透性,建議在樹木底下佈設一定數量的林下點。
檢查點測量
基於點雲進行坐標測量時,推薦先使用可見光顯示模式找到檢查點大致位置,然後切換反射率顯示模式精確測量檢查點中心坐標。
使用TerraSolid、點雲智繪、Lidar360等第三方點雲分析軟件進行精度檢驗時,可以輸出高程精度報告,檢查點報告中重點關注中誤差(RMSE)指標。注意,此類軟件只做高程精度的檢驗,不會輸出平面檢查報告。
建議作業參數
禪思L1|航線飛行
手動數據採集推薦參數
應用場景
手動數據採集常見於對獨棟建築物掃描或針對電力線進行手動掃描等場景。
設置參數
負載設置-回波模式:雙迴波
負載設置-採樣頻率:240kHZ
負載設置-掃描模式:非重複掃描
負載設置-真彩上色:打開
拍照設置-定時拍攝:3s

在採集數據前後均需要進行手動校準慣導。手動飛行時,建議飛行速度8-12 m/s,與拍攝物的距離50-100米,採集過程中可隨時中斷或開始錄製點雲。勻速飛行100s後手動加減速或點擊“標定飛行”校準慣導。
注意
務必在數據採集結束後,也要進行一次手動慣導校準, L1會自動記錄點雲錄製後約2分鐘的慣導數據,用於大疆智圖後差分解算。
地形測繪推薦參數
應用場景
地形測繪場景主要針對生成地形圖、等高線、工程斷面圖等應用,同時也適用於進行單木分割等林業調查項目。
設置參數
飛行高度/仿地飛行高度:飛行高度與精度近似線性關係,地物反射率10%的情況下,L1探測距離是190米。建議飛行高度不要超過150米,否則可能會導致數據丟失。保證高程精度情況下,推薦飛行高度50-100米;
點云密度:每平方米多少個點,與飛行高度、重疊度、飛行速度、掃描方式、雲台朝向等參數有關。點云密度應是數據成果的一個核心指標,應根據點云密度來進行飛行速度和其他參數的設置;
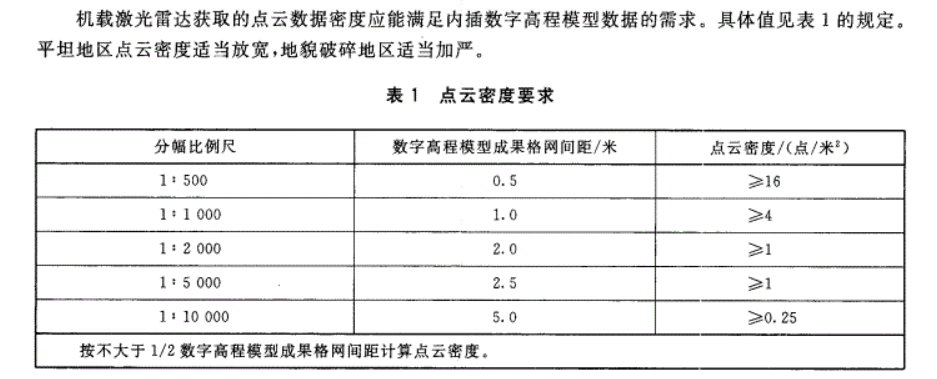
表《CHT 8024-2011機載雷達數據獲取技術規範》中對成果點云密度的要求
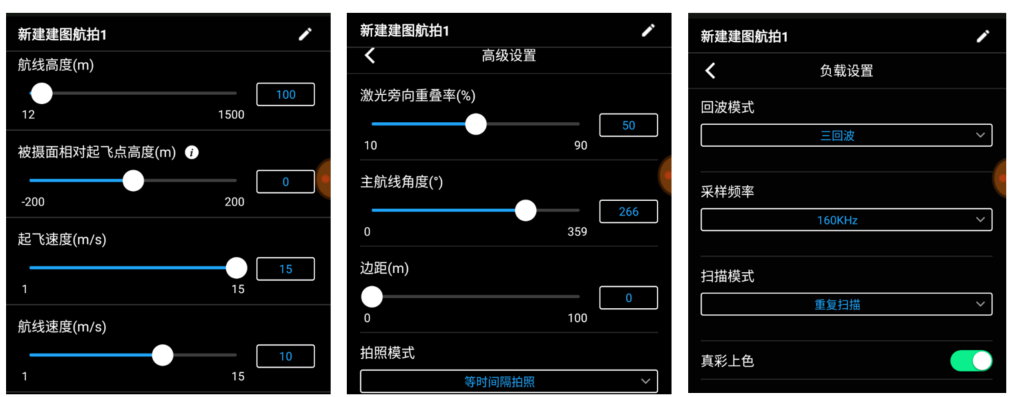
航線速度:根據需要的點云密度來調整航線速度,推薦飛行速度為8-12m/s;
被攝面相對起飛點高度:設置為0
高級設置-激光旁向重疊率:為保證條帶平差時有足夠重疊的點雲數據,以及模型上色的準確性,推薦旁向重疊設置在50%以上;
負載設置-回波模式:三回波/雙迴波
負載設置-採樣頻率:160kHZ/240
負載設置-掃描模式:重複掃描
負載設置-真彩上色:打開
仿地飛行:打開後,需導入DSM文件方能進行仿地飛行。在“DSM文件”處,選擇導入測區的DSM文件進行仿地作業。需注意的是,仿地飛行採用的DSM文件必須是WGS84經緯度形式的大地坐標,不能是投影坐標,文件不宜過大,分辨率低於10米較為合適。DSM文件可以用公開數據源,或使用L1的可見光相機採集一個測區正射數據,使用大疆智圖果樹模式進行二維重建,將果樹模式重建結果中的gsddsm.tif文件拷貝到遙控器中,建議DSM範圍大於測區。為保證測繪精度,當地形起伏大於100米時,推薦使用仿地飛行進行作業。
複雜地形建議
如遇到山區、樹木茂密等作業條件複雜的場景,採集的地麵點數量不夠,可使用交叉航線,或使用傾斜攝影任務,或將飛行速度降至5m/s 等方式進行成果改善。
交叉航線:即飛完東西向航線之後,再飛一個南北向的航線。實際操作中,可將當前的任務複製一份,調整主航線角度為前一個任務主航線角度+90度;
傾斜攝影任務:通過多個角度的拍攝,可一定程度增加地麵點的數量。建議傾角設置為-60°左右,正射航線任務保持上述推薦參數,傾斜任務的重疊度可設置為20%;
降低飛行速度:飛行速度與點云密度近似反比關係。如果發現採集的點云密度不夠,可適當降低飛行速度。
條帶狀測繪推薦參數
應用場景
河道/交通道路測繪場景主要應用於河道測量或道路勘察設計、地形圖、斷面圖等工程測量應用。
設置參數
單航帶:測繪用戶建議不要勾選,單航帶適用於對效率要求高,但精度要求低的場景;
向左/右外擴距離:根據測區的寬度進行調整,為確保精度,要保證有3條航線;
航帶切割距離:推薦1000米。如設置的過長,建議在飛行1000米後暫停進行一次慣導標定;
負載設置-回波模式:三回波
負載設置-採樣頻率:160kHZ
負載設置-掃描模式:重複掃描
負載設置-真彩上色:打開
航線-是否包含中心線:打開
航線高度:建議設置在50-100米,不超過150米;
航線速度:根據需要的點云密度來調整航線速度,推薦飛行速度為8-12 m/s;
被攝面相對起飛點高度:設置為0
標定飛行:打開。航帶飛行中,標定飛行會在航線的首、尾航點處分別進行標定飛行,以校準慣導;
拍照模式:等時間隔拍照;
高級設置-激光旁向重疊率:為保證條帶平差時有足夠重疊的點雲數據,以及模型上色的準確性,推薦旁向重疊設置在50%以上。


電力線推薦參數
應用場景
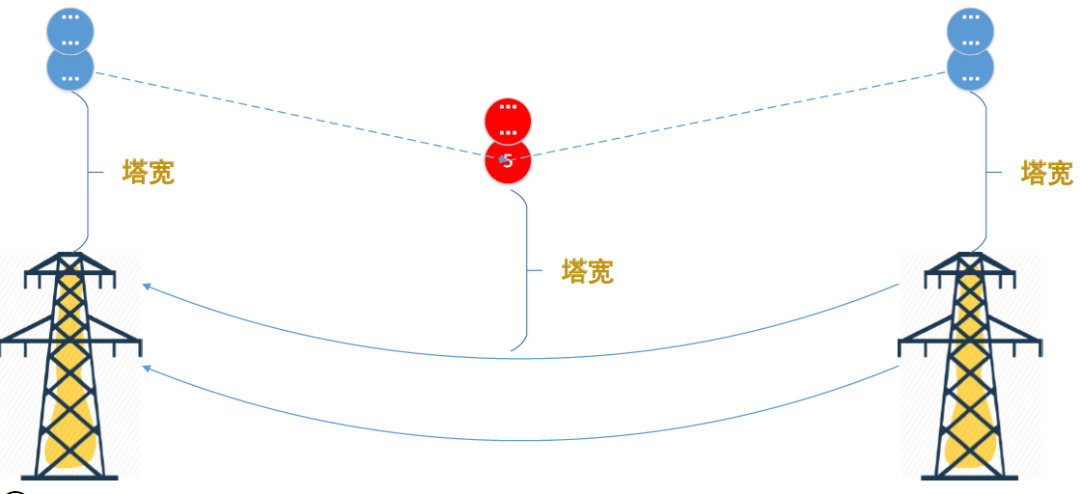
電力線場景主要指獲取主網、配網電力線的點雲,基於點雲進行樹障分析或用於精細化巡檢。當不清楚塔的坐標和高度時,需要先手動打點確定電塔的坐標,然後再執行掃描動作。
獲取電塔坐標
可使用經緯M300 RTK、禦2行業進階版等具備RTK定位的機型,進行打點獲取桿塔坐標。
為保證塔身的完整性,建議航點距離塔頂高度為塔的寬度,一般在20-30米,可將M300下視避障調整為30米,通過避障提示來確認距離距離塔的高度。在作業點距首末端桿塔(遠離作業區段方向)約100-150米水平距離處,線路正上方合適高度添加輔助航線,以確保首尾桿塔點雲被充分採集。
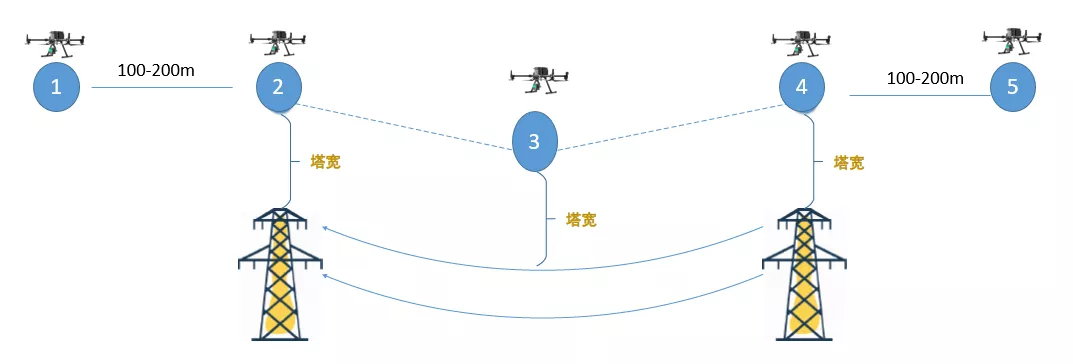
對於弧垂較大的檔(如落差超過50米),可考慮在最大弧垂點上方適當高度(如30米)添加一個航點,使該檔點雲採集質量更好。
編輯航線參數
1、負載設置
回波模式:雙迴波。雙迴波獲取的實際點雲數量最大,有利於減少多層輸電線路點雲漏採情況,提高地麵點採集質量;
採樣頻率:240kHZ
掃描模式:非重複掃描。針對輸電線而言,非重複掃描的FOV更大,結果完整性更高;
真彩上色:打開
高度模式:保持默認的海拔高度(EGM96)。
2、航線(全局)設置
速度:與點云密度成反比,綜合考慮效率和效果,推薦設置在8m/s 左右;
海拔高度:保持默認,不做修改;
飛行器偏航角:設置為“沿航線方向”;
雲台控制:設置為“根據每個航點設置”;
航點類型:設置為“直線飛行,飛行器到點停”。
3、航點設置
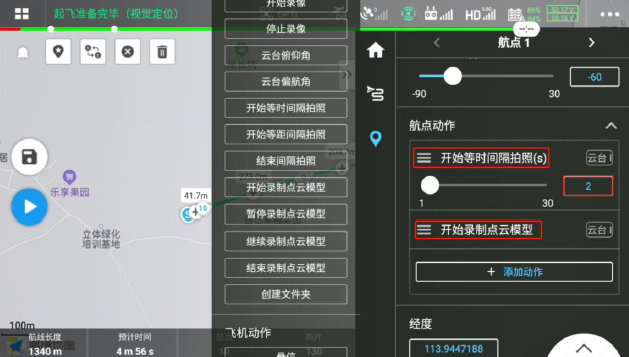
第一個航點:航點動作添加“開始等時間間隔拍照”,間隔設置為2秒;“開始錄製點雲模型”;
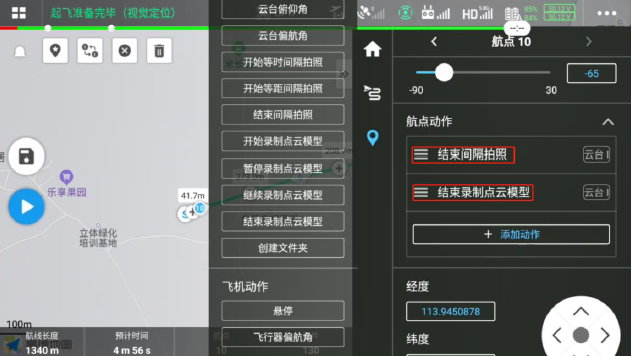
最後一個航點:航點動作添加“結束間隔拍照”,“結束錄製點雲模型”。
雲台俯仰角:-75°(雙航線)/ -90°(單航線);
所有航點的速度、飛行器偏航角、航點類型均勾選“跟隨航線”,海拔高度不勾選“跟隨航線”;
確認RTK狀態:確保RTK狀態為固定解。
數據存儲
採集的數據會存儲在microSD卡的DCIM文件夾,以任務名命名,檢查文件是否完整。文件夾中應包括後綴名為CLC(雷達相機標定數據)、CLI(雷達IMU標定數據)、CMI(視覺標定數據)、IMU(慣導數據)、LDR(激光雷達點雲原始數據)、MNF(視覺數據,此文件目前沒有也不影響)、RTB(RTK基站數據)、RTK(RTK主天線數據)、RTS(RTK副天線數據)、RTL(桿臂數據),如開啟模型上色,則還會有JPG(照片數據)。
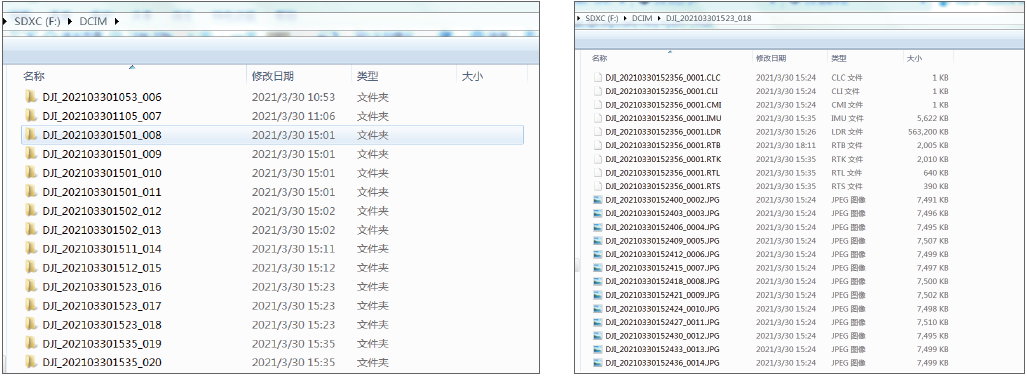
如缺少.RTB文件,則是因為飛行過程中沒有連接RTK或RTK斷聯導致的,數據將不能處理,此時參考“差分定位”部分,可自架基站。
大疆智圖內業處理操作指南
視頻:禪思L1|數據後處理
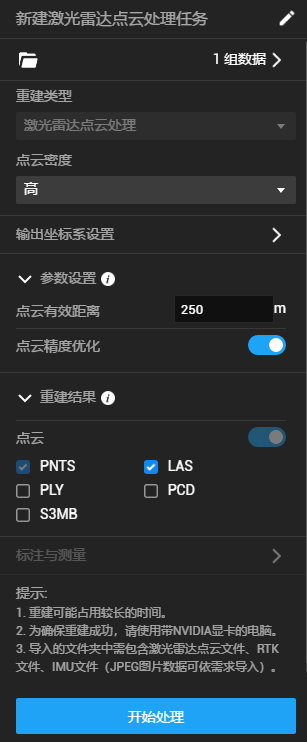
參數設置
點云有效距離:距離LiDAR發射中心超過該設定值的點雲將在後處理時被過濾掉。此參數默認為250米,注意不要設置的太低,否則大部分點都將會被過濾掉。一般當需要重建一個較近的目標區域,但又不可避免地會採集到遠處背景區域時,才需要設置有效點雲距離。可預估採集時刻LiDAR位置和對應區域目標最大直線距離,將其設置為點云有效距離即可。
點雲精度優化:對不同時刻掃描的點雲數據進行平差優化,使得點雲整體精度更高,推薦測繪用戶始終打開此按鈕。其他行業客戶如果對效率要求更高,建議不要打開,因為開啟點雲精度優化之後,處理效率會明顯下降。針對重疊度較差的場景(如高落差電力線),點雲精度優化也有可能產生分層等負面現象,也建議不要打開。
重建結果
默認輸出PNTS(Terra顯示時使用的格式)和las格式(機載雷達輸出的標準格式)的三維點雲。還可選擇輸出為PLY(可在meshlab中打開)、PCD(可在cloudcompare中打開)和S3MB(可在supermap中打開)等三維點雲格式。
大部分點雲分析軟件均不支持大地坐標系的las點雲查看,如輸出坐標系選擇了大地坐標系(如WGS 84大地坐標系,EPSG代號4326),則使用第三方軟件(如cloudcompare、點雲智繪、Lidar360等)打開可能成果變成一條線,無法查看細節,此時應將輸出坐標系改成一個投影坐標系。高程設置:默認的Default為橢球高(即大地高),EGM96 height及其他可選項均為海拔高。
大疆智圖可同時開始多個點雲處理任務。在第一個任務完成前,其餘任務將處於排隊狀態,上一個任務完成後其餘任務會按照開始順序依次處理。
UTC無人機培訓















