DJI大疆經緯M300 RTK 新固件發布,支持DJI P1 及毫米波雷達
DJI大疆行業應用台灣代理 先創國際
新年伊始,我們再次迎來經緯M300 RTK 的軟硬件“進化”——新固件升級,支持DJI P1 及環掃毫米波雷達。這將為測繪、巡檢等領域的無人機作業,帶來廣闊的新空間。

1. 支持DJI P1
新增支持DJI P1 負載相機。這將使經緯M300 RTK 的航測能力邁入全新紀元。DJI P1 集成了4500 萬像素全畫幅傳感器、三軸雲台,支持多款定焦鏡頭,配合大疆智圖軟件,是一個適用於大面積快速測繪的先進航測方案。

2. 支持環掃毫米波雷達
新增支持環掃毫米波雷達避障配件。在環掃毫米波雷達的加持下,經緯M300 RTK將擁有更強大的避障能力,對於高壓線、樹枝這類細小的、視覺系統難以捕捉的障礙物,也能準確識別。在夜間飛行這類視覺無法生效的場景,毫米波雷達依然能夠發揮作用,提升飛行作業安全。(注:環掃毫米波雷達即將開放下單)

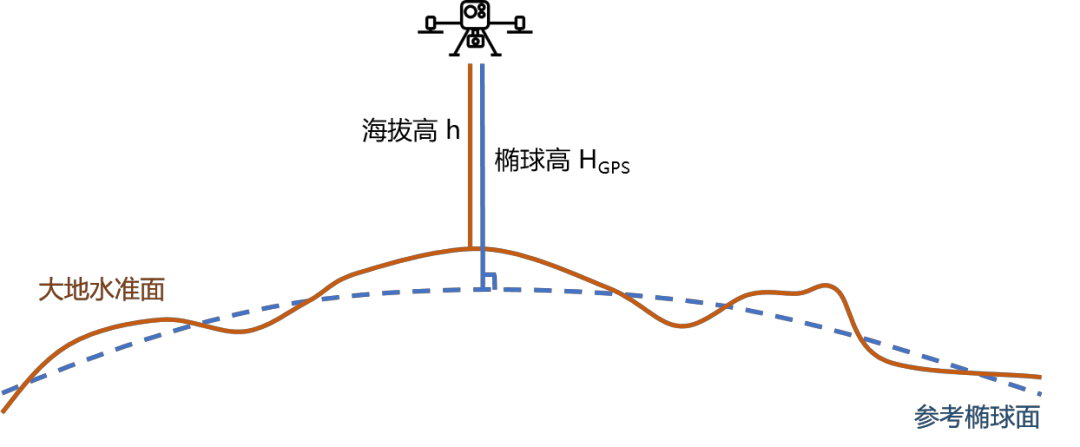
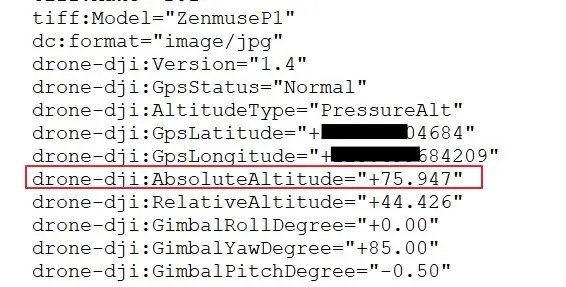
3. 顯示海拔高
在手動飛行和航線規劃時,飛行器和RNG 點的絕對高度顯示(ASL)從橢球高修改為海拔高(使用EGM96 模型),以便與常用海拔高度對應。
飛行界面

航線規劃

RTK 設置

照片信息
4. 優化航線任務
(1) 建圖航拍任務新增仿地飛行功能,用戶可以導入包含地表高度信息的DSM 文件實現仿地飛行;
(2) 在執行建圖航拍、傾斜攝影和航帶飛行這些航線任務時,遙控器拍照、錄像按鍵操作將失效,避免誤操作;
(3) 航線規劃時,相機列表新增H20 系列的紅外相機和PSDK 102S 相機選項;
(4) 增加航線任務暫停時具體原因的文案說明;
(5) 優化航線任務照片漏拍問題;
(6) 優化雲台角度控制,增加重試機制,提升成功率;
(7) 修復航點飛行、建圖航拍、傾斜攝影、航帶飛行模式下,雲台偏航角異常轉動的問題;
(8) 修復偶現最後一個航點動作不執行的問題;
(9) 修復偶現結束航線任務後無法自動退出航線的問題。
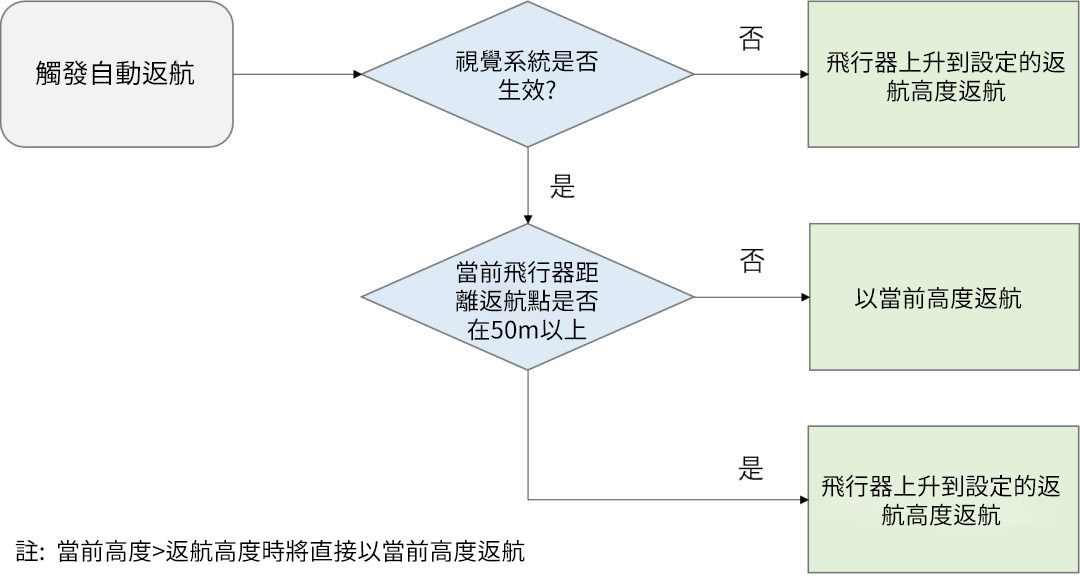
5. 優化返航功能
(1) 返航高度默認值修改為100 米;
(2) 返航水平最高飛行速度修改為15m/s;
(3) 返航邏輯變更:
A. 視覺系統工作時:距離返航點50 米內觸發返航,將以當前高度返航。距離返航點50 米以上觸發返航,將以返航高度返航;若飛行器高於返航高度,將以當前高度返航。
B. 視覺系統失效時:將以返航高度返航;若飛行器高於返航高度,將以當前高度返航。
6. 新增遙控器電量低於10% 時禁止起飛的限制。
7. 新增遙控器錄製屏幕時錄製聲音功能。
固件信息
飛行器固件: v02.02.01.02
遙控器固件: v02.02.01.02
Pilot App Android版本: v2.2.1.7
D-RTK 2移動站經緯版: v03.00.00.16(D-RTK 2移動站:v02.02.0505)
智能電池箱: v01.05.06.07
電池固件: v01.02.05.30
Zenmuse H20/H20T: v02.02.01.00
Zenmuse P1: v02.02.01.00
Zenmuse Z30: v01.00.07.10
Zenmuse XT2: v01.00.03.50
Zenmuse XT S: v01.00.00.09
DJI X-Port: v01.03.02.00
DJI Skyport: v01.04.00.00
DJI Skyport V2:v01.03.02.00
DJI Assistant 2 For Matrice: v2.0.13