UTC學堂|無人機太陽能光電巡檢只需三步
原創
本次案例地點位於鹽源縣白烏太陽能光電站,此站二期和三期總裝機共100MWp,高達40 萬塊的太陽能光電面板組件在運行過程中難免出現缺陷,影響發電量,造成經濟損失。

傳統巡檢 VS 無人機巡檢
傳統巡檢
以1組2人巡檢班組為例,手持紅外熱成像儀,採用步行巡檢方式單次巡檢完成整個太陽能光電站需耗時45個工作日,傳統純人工太陽能光電巡檢模式低質低效,行業痛點尤為突出。
無人機巡檢
同樣是1組2人,在設置好分區使用自動飛行的情況下,作業量可以達到每天2~3平方公里,完成整個太陽能光電站的巡檢工作僅需2個工作日。


作業流程
(作業前需了解太陽能光電站主要參數)
一、生成正射影像
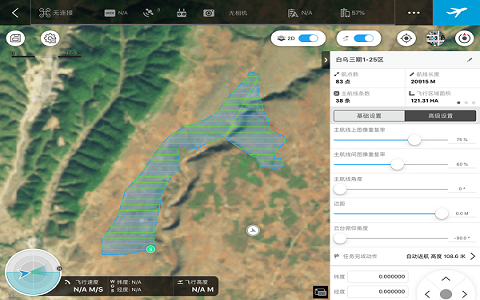
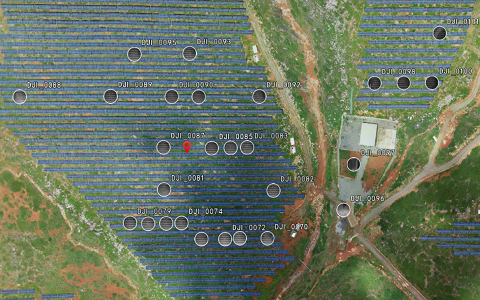
使用航線規劃軟件(GS Pro、DJI Pilot、GS RTK等),對太陽能板進行二維正射影像採集,隨後使用大疆智圖等軟件生成二維正射影像,並將生成的正射影像導入大疆智圖等軟件,方便定位故障太陽能板的位置。
二、面板組件巡檢
一般來說面板組件成東西向為排,南北向為列,巡檢的飛行模式為首先飛往該分區的左上角最遠點,保持機頭朝向正北。根據地形調整航高,保持畫面中同時存在固定排數的面板組件,航線垂直於機頭方向從西向東完成第一條航線,隨後向南移動至另一排數的面板組件完成第二條航線,直至一個區域飛行完成。
注意
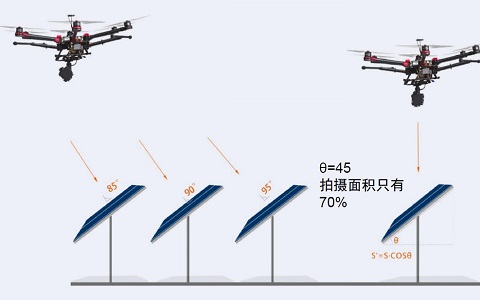
(1)拍攝時注意調整雲台相機角度使其垂直於太陽能板組件進行拍攝;
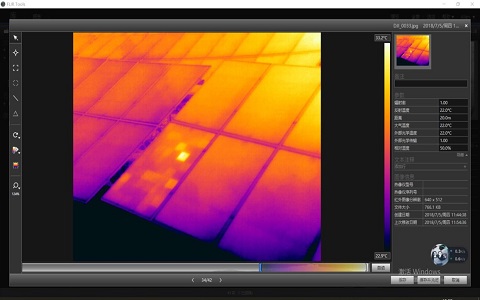
(2)通過設置等溫線和高溫報警,配合高亮屏,就算在戶外也能輕易發現缺陷點。缺陷點溫度相對於正常面板組件較高,在巡檢過程中會以紅色像素的閃爍進行報警;
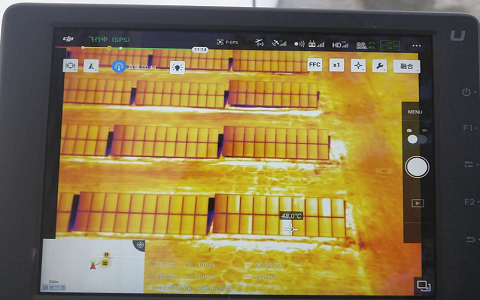
(3)配合Flir Tools也可以對原始的只有灰度的紅外影像進行偽彩加強;
三、故障定位方法
禪思XT 系列熱紅外雲台所拍攝的圖片包含POS 信息,將POS 信息導入到正射影像裡面,就能看到缺陷圖片的拍攝位置。再通過圖像對比,快速精準判斷哪塊光伏面板與組件出現故障與缺陷。
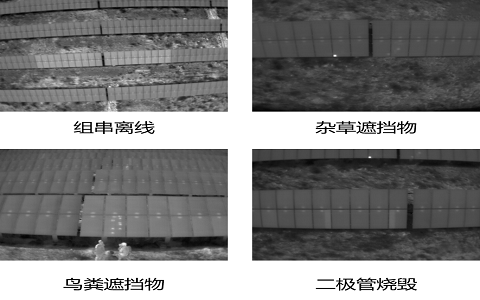
附:歸納幾類常見故障
(1)組件內電池故障
(2)二極管故障或接線盒虛焊
(3)組件表面污跡或內部故障
(4)組件內部電池片損壞
(5)整串故障發熱、保險燒毀或斷路
(6)雜草或鳥糞遮擋
當我們掌握好以上幾點,就可以正確使用無人機進行光伏巡檢,最大程度地減少人工投入,提高單位工作效率,避免因為缺陷而造成的損失。