精度報告–精靈4 RTK 為長春東朝陽溝舊城改造提供1:500 航測圖

舊城改造一端連著發展,一端繫著民生。為推進長春市舊城改造,改善當地居民生活環境,DJI 大疆行業應用合作夥伴雲信空間科技受託對長春市東朝陽溝進行地理信息數據的採集。項目要求採用傾斜攝影測量技術,並生產出滿足1:500 大比例尺測圖標準的實景三維模型。
我們一起去看看精靈Phantom 4 RTK 是如何完滿該項目的!
❋ 工程概況
 試驗區範圍
試驗區範圍
測試目標要求實景三維模型成果要能滿足精度較嚴格的城市測量規範中1:500 測圖標準,即:平面中誤差±0.25m,高程註記點中誤差±0.15m,最大允許誤差不超過2倍中誤差。測量基准採用長春市坐標系統、長春市高程系統,投影方法為任意帶高斯-克呂格投影。工程中RTK 數據採集統一使用千尋網絡RTK 系統作為差分源。
❋ 作業流程
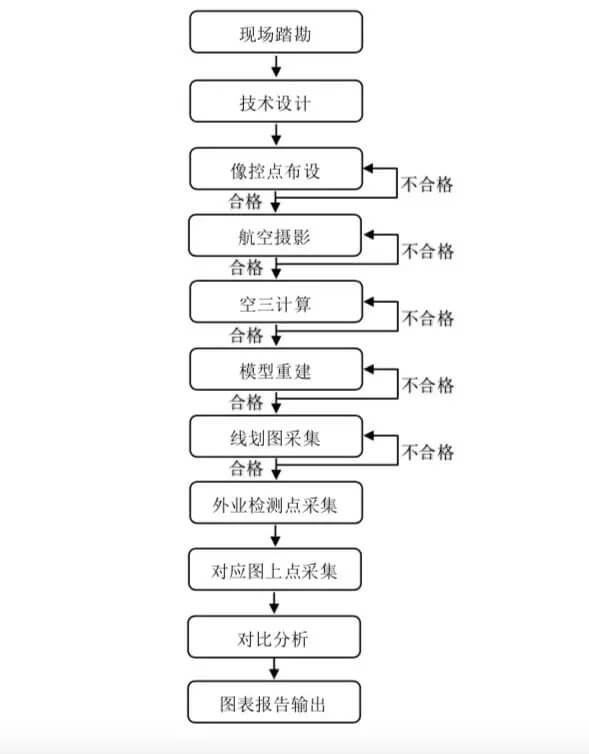
❋ 航飛外業

像控點設置

像控點設計分佈圖
2. 航線規劃
好的航線設計,是外業飛行數據高質量的關鍵之一。本次飛行直接在精靈Phantom 4 RTK遙控器內置的GS RTK中導入KML文件,以進行飛行航線的規劃和飛行參數的設置。項目航線主要設計參數如下:
(1)地面分辨率:2.47cm
(2)航向/旁向重疊度:80% 80%
(3)飛行速度:7m/s
相對航高、航線間隔、拍照間隔等數據,GS RTK 會根據航高(或GSD)和重疊度自動給計算出來。

圖4 航線規劃圖
3.飛行
採用攝影測量3D 作業方式飛行。

外業飛行現場
4. 數據的檢查與整理
航飛數據使用自定網絡,飛行過程全程固定解。對照片進行整理、檢查,對控制點進行整理。
❋ 數據處理及實景三維模型生產
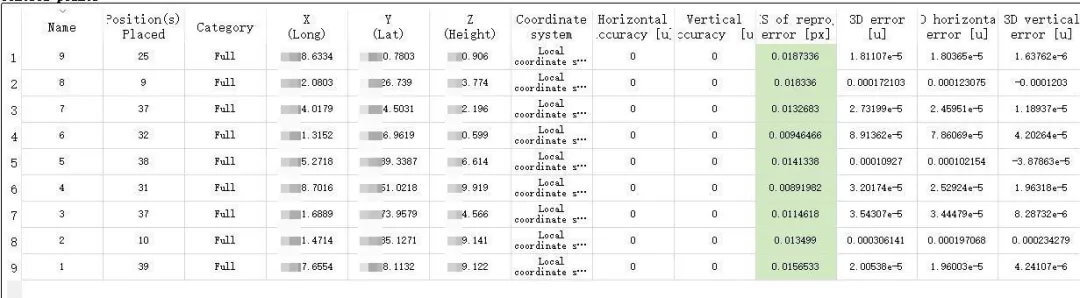
像控點三維精度水平計算結果

帶像控點的空三成果3D 視圖
2. 三維模型的重建
空三成果合格後,就進入模型重建生產環節。本項目採用OSGB 格式,其通用性比較好,支持的軟件也比較多。

模型成果截圖
 模型成果局部截圖
模型成果局部截圖
❋ 數字精度檢測
(1)平面精度檢測
利用長春市CORS 系統,採用GNSS 接收機RTK 模式直接佈設圖根控制點,使用全站儀採用極坐標方式測定明顯地物點的坐標,通過檢測坐標與成果圖獲取坐標的對比,檢測地形圖的平面精度。
(2)高程精度檢測
利用長春市CORS 系統,採用GNSS 接收機RTK 模式直接採集高程註記點,通過檢測高程與成果圖註記的高程對比,檢測地形圖的高程精度。
(3)精度檢測計算方法
地物點平面精度及高程精度檢測後的數據採用高精度檢測公式計算,如下:
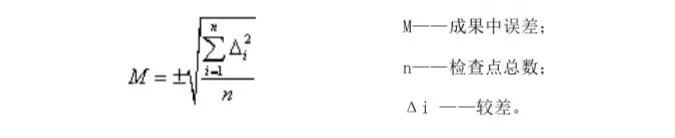
注:在允許中誤差2倍以內(含2倍)的誤差值均參與數學精度統計,超過允許中誤差2倍的誤差視為粗差。
2. 檢測結果
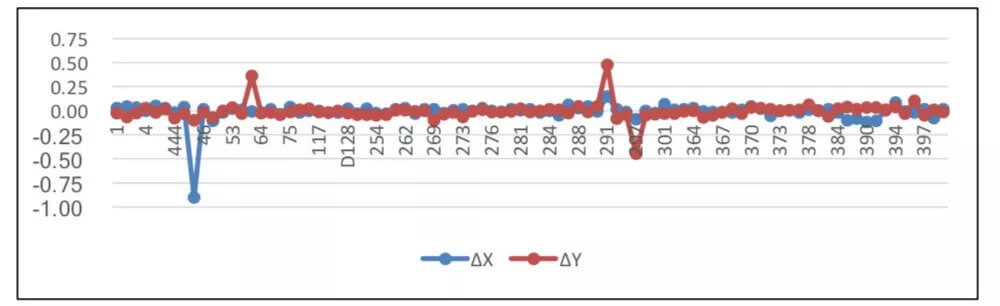
(1)平面精度統計

試驗區共採集平面檢測點87 個,有效檢測點87 個,粗差1 個;x 方向中誤差Mx=±0.04m;y 方向中誤差My=±0.09m;點位中誤差Ms=±0.10m
x、y 誤差離散情況如下:
點位S 誤差離散情況如下:
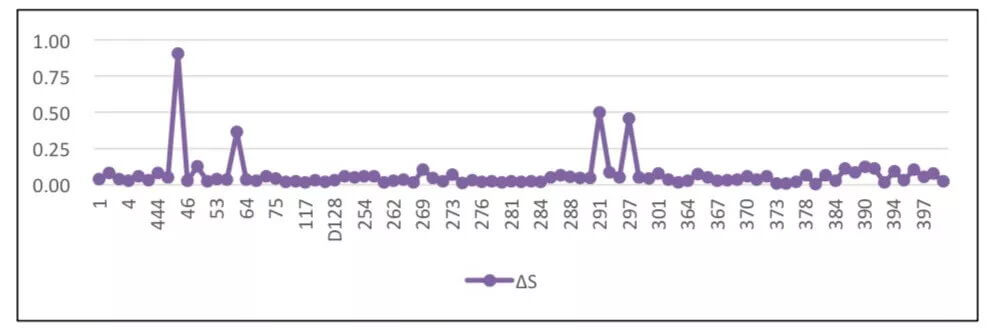
(2)高程精度統計
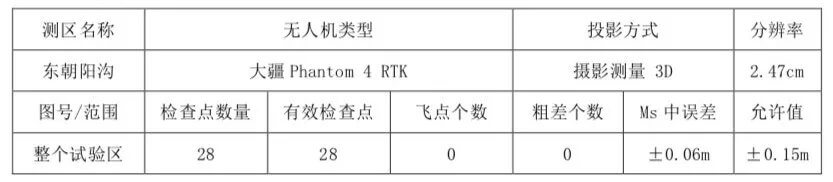
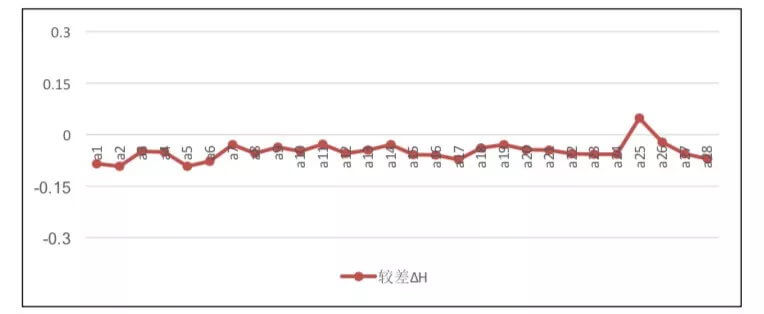
試驗區共採集高程檢測點28 個,有效檢測點28 個,粗差個數為0 ;中誤差Mh=±0.06m;
高程h 誤差離散情況如下:
❋ 總結
此工程項目的外業投入人員踏勘,像控點,外業飛行總計2 人1 天,內業處理共計1 人1 天。經計算,採用大疆精靈Phantom 4 RTK 航測解決方案的效率是傳統測繪方式的10 倍甚至更高。在保證精度的前提下,精靈Phantom 4 RTK 還能極大提高測繪的作業效率,降低外業人員的勞動強度,更好地保障外業人員的人身安全。
